

Flexiblere Automatisierungslösungen können Facharbeiterlücken schließen
Kleine und mittelständische Unternehmen (KMU) stehen vor der Herausforderung in geringen Stückzahlen und vielen Varianten produzieren zu müssen. In einem globalen Wettbewerb ist die stetige Anpassung an den Kunden gerade für KMU essentiell. Um auf Prozessänderungen und kurzfristige Aufträge schnell reagieren zu können, prägt der Mensch an der Maschine immer noch das Bild in den Produktionshallen des deutschen Mittelstands. Zur Herstellung der Produkte bedient der Mensch Werkzeugmaschinen (WZM), richtet diese situationsgerecht ein und führt Vor- sowie Nachbearbeitungsaufgaben durch.
Kommt es jedoch zu Personalengpässen oder -ausfällen, bspw. in Nachtschichten, an Wochenenden oder durch Urlaubszeit, droht der Stillstand an einzelnen WZM. Herkömmliche Automatisierungslösungen sind für diesen Fall zu unflexibel und erst bei größeren Losen wirtschaftlich. Ein menschlicher Ersatz ist durch den Fachkräftemangel hingegen nur schwer oder gar nicht zu realisieren. Zudem ist der Job als Maschinenbediener gerade in Nachtschichten monoton und unattraktiv. Deshalb benötigen Mittelständler für eine effiziente Produktion flexiblere und mobile Lösungen. Diese müssen aufwandsarm an verschiedenste WZM zu applizieren sein und Bedienertätigkeiten selbstständig automatisieren können.
Die mobile Roboterzelle automatisiert ohne Schnittstelle zur Werkzeugmaschine
Das Projekt Merhabe wird durch die Sächsische Aufbaubank (SAB) gefördert. In Kooperation mit den Partnern Industrie-Partner GmbH aus Coswig und Dr. Matzat & Co. GmbH aus Auerbach widmet sich das Fraunhofer IWU der Entwicklung einer mobilen und flexiblen Roboterzelle. Diese dient zur Automatisierung von Bedienertätigkeiten an WZM. Die Zelle besitzt die Besonderheit einer schnittstellenlosen Maschinenanbindung. So ist kein mechanisches oder steuerungsseitiges Retrofitting an den Bestandsanlagen der Kunden nötig. Dadurch wird die Inbetriebnahme der Zelle stark vereinfacht. Der kompakte, mobile Zellenaufbau wird hierfür mit Hilfe von zwei Mitarbeitern durch die Produktionshalle geschoben und an der zu automatisierenden WZM positioniert. Zentrale Bestandteile der Zelle sind:
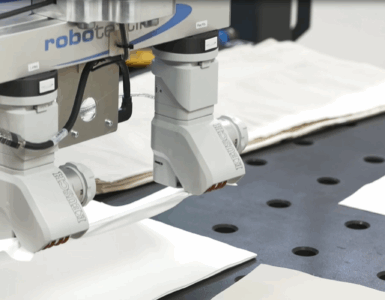
- ein Industrieroboter zur Bauteilhandhabung
- ein frei konfigurierbares Puffersystem mit Palettenzuführung als Bauteilspeicher
- ein mitgeliefertes, von der Roboterzelle per Funk angesteuertes Spannmittel.
Durch eine smarte Kamera lernen Roboter das Sehen
Im Sinne eines „maschinellen Auges“ dient eine am Roboterarm befestigte smarte Kamera. Diese lokalisiert die Bauteile und Adaption der Handhabebewegungen des Roboters. Das intelligente Kamerasystem wird darüber hinaus zur Verortung der WZM und zur optischen Auswertung des Maschinenzustandes eingesetzt: zum Beispiel anhand von Leuchten an Signalsäulen und Maschinenbedienfeldern. Damit sieht der Robo Operator® in jeder Situation, wo und in welchem Zustand sich Bauteile und WZM in seinem Arbeitsraum gerade befinden, um den Ablauf und Bewegungen daran selbstständig anzupassen. Der Robo Operator® bedient Schalter und Türen der WZM eigenständig. Einmalig an einer WZM angelernt, ist die Zelle durch die smarte Kamera binnen weniger Minuten ohne Roboterprogrammierkenntnisse wieder zur Automatisierung einsatzbereit.
Automatisierte Bedienerfähigkeiten zur zweitweisen Vermietung bereitstellen
Neben der Bauteilhandhabung und Bedienung der WZM übernimmt der Robo Operator® auch Nachbearbeitungsschritte, wie Entgrat-, Säuberungs- oder Messaufgaben. Die Aufgaben sind hardware- und steuerungsseitig in Fähigkeitsmodulen gekapselt und zusätzlich an der Roboterzelle applizierbar. Die Komposition der automatisierten Fähigkeiten erfolgt über eine nutzerfreundliche graphische Benutzeroberfläche, die den Bediener anhand eines Workflows durch den Einrichtprozess leitet. Das Spanen der Werkstücke in der Werkzeugmaschine bewerkstelligt ein von der Roboterzelle funkbedientes Spannmittel mit Batterieversorgung für eine komplette Schicht. Ergänzt wird die Roboterzelle durch ein offenes Sicherheitskonzept über Laserscanner sowie Machine-Learning-Algorithmen. Diese dienen der Beschleunigung des Einrichtprozesses und Anwahl von Entstörstrategien im Fehlerfall.
Der Robo Operator bündelt automatisierte Bedienerfähigkeiten in einer mobilen Roboterzelle und stellt diese an Werkzeugmaschinen ohne Nachrüstungen bereit. Durch die Nutzung der Kamerainformationen kann er flexibel auf die jeweils aktuellen Anforderungen reagieren und stellt so die eine Ausbaustufe der kognitiven Produktion dar. Über ein Vermietkonzept gelangt der Robo Operator® schnell in den industriellen Einsatz, womit Facharbeiterlücken bei KMU kompensiert werden können.
Weiterführende Informationen zum Vermietkonzept erhalten Sie hier.
Titelbild: © Industrie-Partner GmbH Coswig


Kommentar hinzufügen