

Das Letzte, was ein Bediener einer Werkzeugmaschine hören will – ein lauter Knall. Weiterhin gehören Kollisionen von bewegten Komponenten zu den Hauptursachen für Maschinenausfälle von Werkzeugmaschinen, trotz implementierter Kollisionsvermeidungssysteme und breiter Verwendung dieser Systeme. Abhilfe schafft dabei das radarbasierte Kollisionsvermeidungssystem RadarProtect, das aus dem Vorprojekt SensoProtect heraus entwickelt wird. Mit RadarProtect werden Kollisionsgefahren rechtzeitig erkannt und die Maschine vor Kollisionseintritt abgebremst.
Sind Kollisionen in Werkzeugmaschinen endlich im Griff?
Viele Maschinenausfälle können trotz des Einsatzes verschiedenster Systeme, wie modellbasierter Kollisionsvermeidungssysteme oder Werkzeugidentifikationssysteme, nicht verhindert werden. Eine im Rahmen des Vorprojekts SensoProtect durchgeführte Studie zeigte, dass die Hauptursache für Kollisionen weiterhin der Mensch ist. Bis zu 52 Prozent der Kollisionen haben ihren Ursprung allein in der reinen Fehlbedienung der Maschine, wie etwa eine falsche Programmauswahl oder eine fehlerhafte Werkstückeinmessung. Bereits existierende Systeme kommen bei solchen Fehlbedienungen schnell an ihre Grenzen, wodurch aktuell kein ausreichender Kollisionsschutz gewährleistet werden kann. Kollisionen, bedingt durch menschliche Fehler, können dadurch zu Schäden führen, die mit langen Maschinenstillständen und hohen Kosten einhergehen.
Das im Vorprojekt SensoProtect hervorgebrachte System wird im Rahmen des im August 2024 gestarteten Folgeprojekts RadarProtect gemeinsam von den Fraunhofer-Instituten IWU und ENAS verbessert und weiterentwickelt, um Kollisionen in Werkzeugmaschinen bestmöglich zu verhindern.
Die radarbasierte Kollisionsvermeidung – ein verbesserter Schutz vor menschlichen Fehlbedienungen
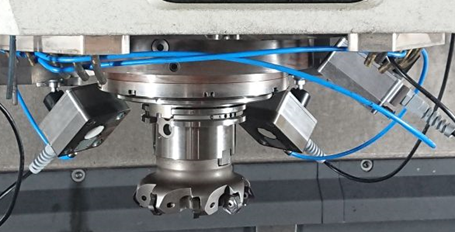
Im Vorprojekt SensoProtect wurde ein radarbasiertes Sensorsystem entwickelt, das die geometrischen Abmessungen und Relativabstände potenzieller Kollisionspartner im kollisionskritischen Bereich um das Werkzeug und die Werkzeugspindel erfasst (Abbildung 1). Dank einer leistungsstarken Signalverarbeitung sowie einer innovativen Entscheidungslogik können durch rechtzeitiges Abbremsen der Maschine erstmals Kollisionen vermieden werden, die durch den Menschen verursacht sind. Zum Abbremsen sendet das Kollisionsvermeidungssystem dazu, je nach Kollisionsszenario, ein Signal zur Vorschubreduktion oder ein Stoppsignal an die Maschinensteuerung. Im Forschungsprojekt RadarProtect wird nun eine Performancesteigerung des Systems angestrebt, die durch eine schnellere Datenverarbeitung und ein erhöhtes Ausleucht- sowie Auflösungsvermögen erreicht werden soll. Zudem soll durch die Implementierung eines Objekttracking-Algorithmus die Erkennung potenzieller Kollisionspartner und die Robustheit der Kollisionsvermeidung verbessert werden.
Sensorintegration: Eine bestmögliche Lösung zur Nachrüstung
Im Forschungsprojekt RadarProtect wird zudem angestrebt, dass das radarbasierte Kollisionsvermeidungssystem später nicht nur herstellerseitig integriert werden kann, sondern auch als kostengünstige Nachrüstlösung für die Maschinenanwender zur Verfügung steht. Ein weiterer Schwerpunkt liegt daher in der Miniaturisierung der verwendeten Radarmodule sowie in der Optimierung der Sensorplatzierung, damit eine maximale Ausleuchtung des Arbeitsraums bei kompakter Bauweise des Gesamtsystems erreicht werden kann. Dadurch soll eine leichte Integrierbarkeit des Systems für Maschinenanwender geschaffen werden, um auch bestehende Maschinen – ohne große Neuanschaffungen – besser vor Kollisionen schützen zu können. Auch die mögliche Verwendung von MIMO-Radarsensoren, die eine direkte 3D-Objektlokalisation ermöglichen und so eine Reduzierung der Sensoranzahl bewirken, wird in diesem Kontext näher betrachtet.
Potenziale des radarbasierten Systems
RadarProtect hebt sich grundsätzlich von allen bisher verwendeten und etablierten Kollisionsvermeidungssystemen ab und bringt einen deutlichen Mehrwert für die Maschinenanwender, da kollisionsbedingte Maschinenstillstände sowie Reparatur- und Ausschusskosten, die auf menschliche Fehler zurückzuführen sind, zuverlässig verhindert werden. Weil das System zudem modellunabhängig arbeitet und potenzielle Kollisionspartner direkt wahrnimmt, besitzt es keinen Aufwand in der Pflege von Geometriemodellen. Kleine Losgrößen und vielfältige Werkstückgeometrien sind für das System daher unproblematisch.
Bei erfolgreicher Weiterentwicklung können menschenverursachte Kollisionen in großem Umfang vermieden werden, was die Prozesssicherheit und den Schutz der Maschinen auf ein neues Niveau hebt. Darüber hinaus wird die Werkzeugmaschine in der Lage sein, sich selbst zu überwachen und autonom zu reagieren – ein weiterer Schritt hin zur kognitiven Maschine.
Für Rückfragen und Anmerkungen steht Ihnen Franz Schwarz gerne via LinkedIn oder unter folgender Mailadresse zur Verfügung: franz.schwarz@iwu.fraunhofer.de.
Headerbild: © Fraunhofer IWU
Autor: Franz Schwarz



