Doch wie lässt sich dies bei oft unfreundlichen Arbeitsraumbedingungen einer Werkzeugmaschine realisieren, wo heiße Späne umherfliegen, und Kühlschmierstoff herumspritzt?
Die Null-Fehler-Produktion ist der Traum jedes Werkzeugmaschinenbesitzers. Eine kontinuierliche Messung der realen Lage und Orientierung des Werkzeugs kann erheblich zu diesem Ziel beitragen. Leider gibt es viele Hindernisse, wie die Bedingungen im Arbeitsraum und variierende Temperaturen, die eine präzise Messung erschweren. Hinzu kommen noch sehr hohe Kosten für hochpräzise Messsysteme (wie z.B. laserbasierte Messsysteme), was am Ende dazu führt, dass bisher keine Lösung für die direkte Messung der Werkzeugposition während der Bearbeitung allgemein akzeptiert wurde.
Am Fraunhofer IWU arbeiten wir daran, ein Inertial Measurement Unit (IMU) für diese Aufgabe zu nutzen. Das IMU kombiniert einen Beschleunigungssensor und ein Gyroskop, um vollständige Informationen über die Bewegung im Raum mit sechs Freiheitsgraden zu liefern. Um Lage und Orientierung präzise zu bestimmen, müssen die IMU-Signale zeitlich integriert werden. Dies führt jedoch aufgrund von Sensorfehlern zur großen Ungenauigkeit.
Das Projekt „AccuMonit“, welches im Rahmen des internationalen Förderprogramms Cornet gefördert wird (Link), zielt unteranderem auf diese Problematik. Hier wird eine Methode zur Unterdrückung der Ungenauigkeit bei der zeitlichen Integration der IMU-Signale durch den Einsatz einer Sensordatenfusion entwickelt. Die Sensordatenfusion kombiniert die IMU-Daten mit Signalen aus den linearen Messsystemen der NC-Achsen, wodurch die Ungenauigkeit aus der Integration minimiert werden.
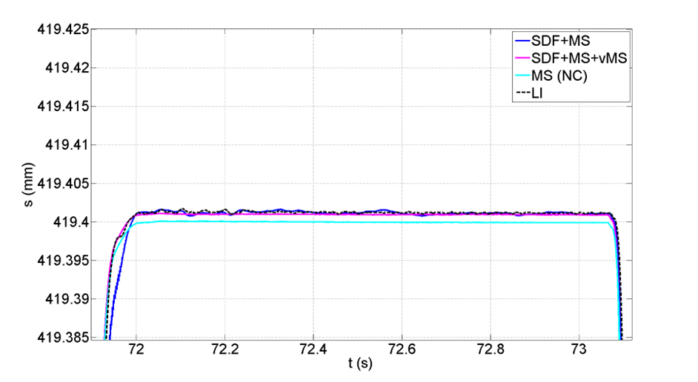
Abbildung 1: Gegenüberstellung am Spindelstock gemessener Position einer NC-Achse mit dem Laserinterferometer (LI – schwarz, gestrichelt), aus dem Messsystem der NC (MS – hellblau), aus der Sensordatenfusion für IMU und NC-Messsystem (SDF+MS – blau) und aus der Sensordatenfusion für IMU, NC-Messsystem und Geschwindigkeit der Vorschubachse (SDF+MS+vMS – violett) © Fraunhofer IWU
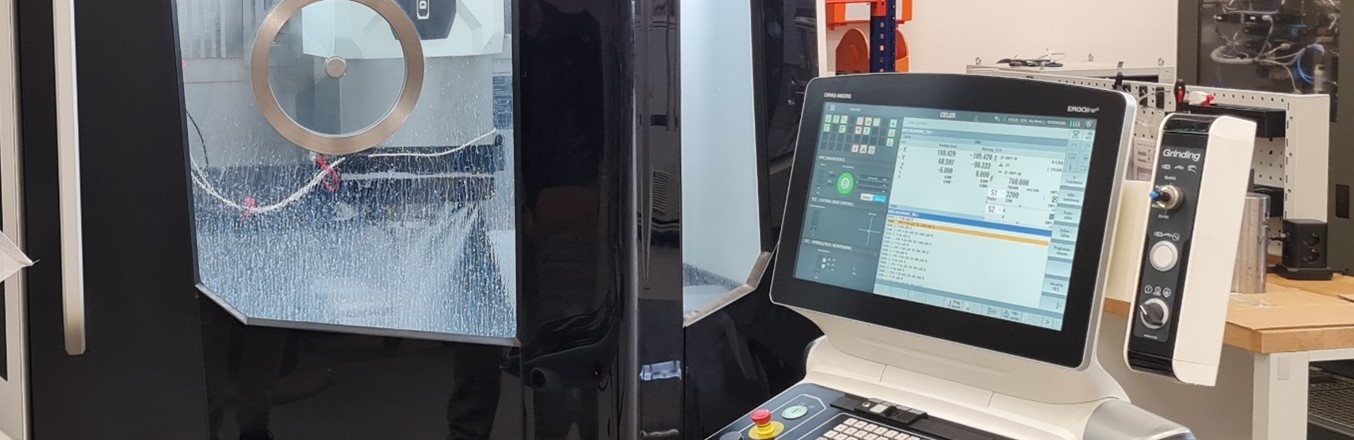
Um die Effektivität dieses Ansatzes zu testen, wurden Experimente in einer Werkzeugmaschine durchgeführt. Dabei wurde die Position mit Hilfe der Sensordatenfusion simultan zur Messung mit Laserinterferometer ermittelt. Die Ergebnisse zeigen, dass die Sensordatenfusion in der Lage ist, die Position des Werkzeugs während der Bearbeitung präzise zu messen.
Da das IMU für den Einsatz im Arbeitsraum einer Werkzeugmaschine ausreichend robust ist und seine Anschaffungskosten akzeptabel sind, macht dieser Ansatz einen erheblichen Schritt näher zur kontinuierlichen Messung der realen Lage und Orientierung des Werkzeugs während der Bearbeitung. Diese ermöglicht, Maschinen auf unerwünschte Änderungen zu reagieren. Hiermit kann die kognitive Fähigkeit der Maschine gesteigert und einen maßgeblichen Beitrag zur Null-Fehler-Produktion geleistet werden.
Zukünftig planen wir ein Projekt, das diese vielversprechende Technologie weiterentwickeln und anwendungsorientiert testen soll.
Für Rückfragen steht Ihnen Herr Dr. Martin Kolouch gerne zur Verfügung:
martin.kolouch@iwu.fraunhofer.de oder auf LinkedIn.
Headerbild: © Fraunhofer IWU
Autor: Dr. Martin Kolouch