Das Teachen von Robotern braucht viel Zeit und Fachpersonal
Die Robotertechnik hält Einzug in immer mehr Bereiche des produzierenden Gewerbes. Große Akteure, wie Automobilhersteller, setzen bereits seit Jahrzehnten Roboter in großem Stil zur Handhabung und Prozessführung ein. Aber inzwischen finden automatisierte Systeme auch im Mittelstand immer häufiger Anwendung. Im Vergleich zu den hochautomatisierten Szenarien der Automobilindustrie sind die Einsatzfälle bei kleinen und mittleren Unternehmen (KMU) jedoch meist vielseitiger. Hier herrschen kleinere Losgrößen vor und es wird auf verschiedenen Anlagensystemen und Maschinen produziert. Das bedeutet für eine Automatisierung mit Robotern: Bauteile ändern sich regelmäßig, Aufstellsituationen, Maschinenkonfigurationen und Vorrichtungen müssen oft umgerüstet werden. Diese dynamischen Umgebungssituationen führen dazu, dass Roboterprogramme häufiger angepasst – also nachgeteacht – werden müssen, um kollisionsfrei zu arbeiten. Dieses Nachteachen stellt für KMU jedoch einen erheblichen Kostentreiber dar. Während dieser Zeit stehen Anlagen still und es erfolgt somit keine Wertschöpfung. Hinzu kommt, dass oft das qualifizierte Personal für solche Anpassungen fehlt.
Die kamerabasierte Bahnplanung ermöglicht es Robotern, sich selbstständig kollisionsfrei durch sich ändernde Umgebungen zu bewegen
Eine wichtige technologische Grundlage, um die Teachzeiten von Robotern, bei sich ändernden Umgebungssituationen zu reduzieren, ist die Integration kamerabasierter Bahnplanungsmethoden in Robotersysteme. Diese Technologie ermöglicht es dem Roboter, während des Betriebs eigenständig kollisionsfreie Bewegungsbahnen zu generieren, indem er seine Umgebung vorher mithilfe von Kameras erfasst und kartiert. Auf diese Weise kann der Roboter flexibel auf Veränderungen reagieren und neu entstandene Hindernisse werden umfahren. Das manuelle Nachteachen durch einen Programmierer wird dadurch erheblich reduziert oder kann in vielen Fällen sogar vollständig entfallen.
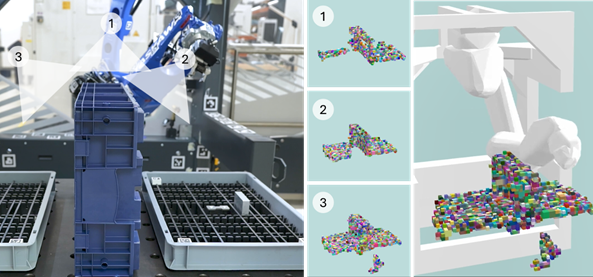
Schritt 1: Der Roboter kartiert die Umgebung
Für die kamerabasierte Bahnplanung definiert der Roboterprogrammierer zunächst sogenannte Kartierungsposen. An diesen Positionen vermisst der Roboter mithilfe einer 3D-Kamera seine Umgebung geometrisch. Dabei werden so viele Posen festgelegt, dass der gesamte relevante Arbeitsbereich abgedeckt ist. Das ist jener Bereich, in dem sich die Umgebungssituation verändern kann. Nachdem die Posen definiert wurden, führt der Roboter vor dem Start des Automatikbetriebs eine initiale Kartierungsfahrt durch, wie in Abbildung 1 zu sehen. In diesem Prozess fährt er alle festgelegten Posen nach und nach ab, um ein aktuelles, reales Kollisionsmodell seiner Umgebung zu erzeugen. Die Informationen über die eigene Kinematik sowie über angeschlossene Peripheriegeräte werden dem Roboter über ein standardisiertes Textformat, sogenannte URDF-Dateien (Unified Robot Description Format), bereitgestellt. Diese enthalten Referenzen auf die entsprechenden CAD-Modelle und ermöglichen so eine einfache Anpassung der Methodik an unterschiedliche Roboterstrukturen.
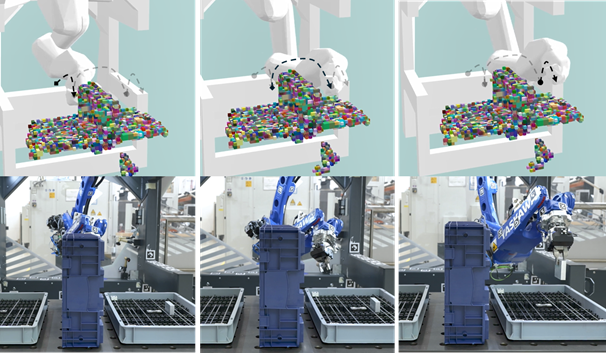
Schritt 2: Intelligente Algorithmen planen kollisionsfreie Bahnen
Mithilfe des zuvor erzeugten Kollisionsmodells und unter Einsatz intelligenter Algorithmen zur Bahnplanung ist der Roboter nun in der Lage, während des Betriebs selbstständig kollisionsfreie Bewegungsbahnen zu berechnen. Diese Algorithmen ermöglichen verschiedene Optimierungen in Abhängigkeit vom jeweiligen Planungsziel. Dazu gehören etwa die Minimierung der Verfahrzeit, der kartesischen Strecke oder der Achsbewegungen. Dadurch kann die Bewegung des Roboters nicht nur sicher, sondern auch effizient gestaltet werden. Ein großer Vorteil dieser Methodik zeigt sich insbesondere bei Pick-and-Place-Anwendungen: Für das Greifen und Ablegen von Bauteilen müssen keine individuellen Greifbewegungen mehr manuell geteacht werden (siehe Abbildung 2). Es genügt, dass der Roboter die Position des anzufahrenden Greifpunkts kennt – entweder aus einer vorberechneten Quelle (wie einem bekannten Raster) oder automatisch ermittelt über eine Kamera.
Durch die kamerabasierte Bahnplanung reduziert sich Programmieren des Roboters auf ein Minimum
Die kamerabasierte Bahnplanung bietet einen entscheidenden Vorteil: Der Programmieraufwand am Roboter vor Ort sinkt erheblich. Anstatt für jede neue Umgebungssituation oder jedes Bauteil manuell Programme und Bewegungen aus mehrzeiligen Codesegmenten zusammenzubauen, kann der Roboter seine Bahnen selbstständig generieren und optimieren. Der Programmierer gibt nur noch einen einzelnen Befehl zum Anfahren der Zielpose vor, die Planung erfolgt automatisch in der Robotersteuerung. Dies spart nicht nur Zeit und Kosten für das Unternehmen, sondern erhöht auch die Flexibilität und Verfügbarkeit der Anlagen. Damit wird der Einsatz von Robotern auch für wechselnde Anwendungen bei kleinen und mittleren Unternehmen wirtschaftlich und zugleich einfacher in bestehende Produktionsprozesse integrierbar.
Das Fraunhofer IWU hat die kamerabasierte Bahnplanung im Rahmen eines internen Forschungsprojekts am Versuchsträger Robo Operator® erfolgreich an einem Industrieroboter umgesetzt LINK . Aktuell untersucht das IWU, wie sich solche Ansätze auch für andere Robotersysteme robust, sicher und praxistauglich anwenden lassen.
Bei Fragen zur Lösung nehmen Sie gerne Kontakt mit Herrn Johannes Abicht: johannes.abicht@iwu.fraunhofer.de auf. Die mobile Roboterzelle mit den Greifersystemen ist im Versuchsfeld des IWU zu sehen.
Headerbild: © Fraunhofer IWU
Autor: Johannes Abicht