

Die Nachfrage nach Industrierobotern ist heute beträchtlich, wie das Marktvolumen von ca. 13,2 Mrd. USD im Jahr 2020 zeigt, und wird in Zukunft weiter steigen [1]. Bereits jetzt können Industrieroboter zahlreiche industrielle Anwendungen, insbesondere im Bereich der Handhabung, realisieren. Gleichzeitig können sie moderne Fertigungsumgebungen mit der Flexibilität ausstatten, sich an kleinere Losgrößen anzupassen. Neue Anwendungen, wie z.B. die spanabhebende Bearbeitung, sowie eine breitere Nutzung der Offline-Programmierung erfordern jedoch eine höhere Positioniergenauigkeit von Industrierobotern [2]. Die Verbesserung der Positionier- und Bahnpositioniergenauigkeit [3], als Maß für den Abstand zwischen der gewünschten und der erreichten Position eines Manipulators, ist Gegenstand der Untersuchung der Manipulatorkalibrierung [4], wobei ein wesentlicher Schritt der Manipulatorkalibrierung die Genauigkeitsbewertung durch Messungen ist.
Generierung von sensitiven Trajektorien, welche die Fehlereinflüsse der Roboterkomponenten sichtbar machen
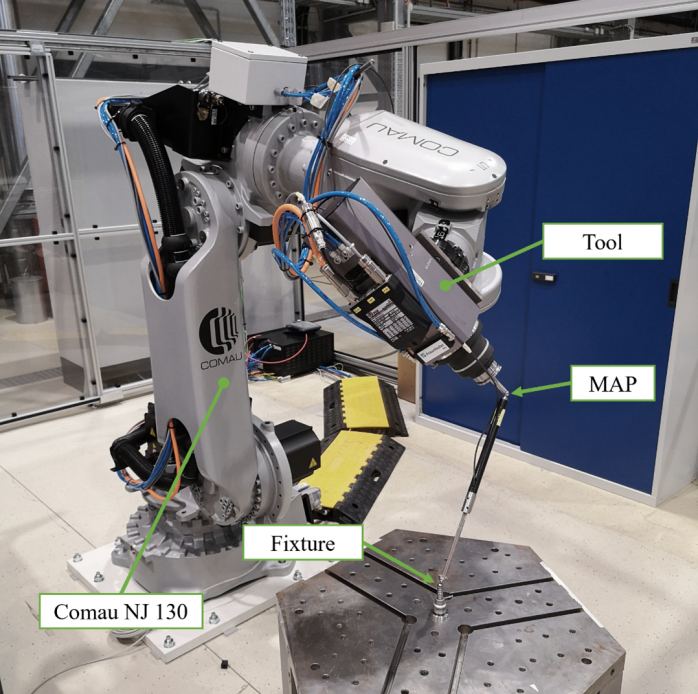
In der gemeinsamen Forschungsarbeit „Accuracy Assessment of Articulated Industrial Robots using the Extended- and the Loaded-Double-Ball-Bar“ haben wir in enger Zusammenarbeit mit der KTH Stockholm das Thema Genauigkeitsbewertung adressiert. In einem ersten Experiment wurde der an der TU Dresden entwickelte Extended Double-Ball-Bar (EDBB) zur Bewertung der geometrischen Genauigkeit eines Comau NJ-130 Roboters verwendet. Es wurden sensitive Messtrajektorien generiert, die Posen bzw. Achsenkonfigurationen berücksichtigen, die die Fehlereinflüsse einzelner Roboterkomponenten maximieren und so die Empfindlichkeit für eine große Anzahl einzelner Fehlerparameter erhöhen. Die entwickelten fehlersensitiven Trajektorien wurden in experimentellen Untersuchungen validiert und mit den Kreisbahnen nach ISO 203-4 verglichen.
Bewertung der Steifigkeit durch belastete Trajektorien mit dem Loaded Double-Ball-Bar
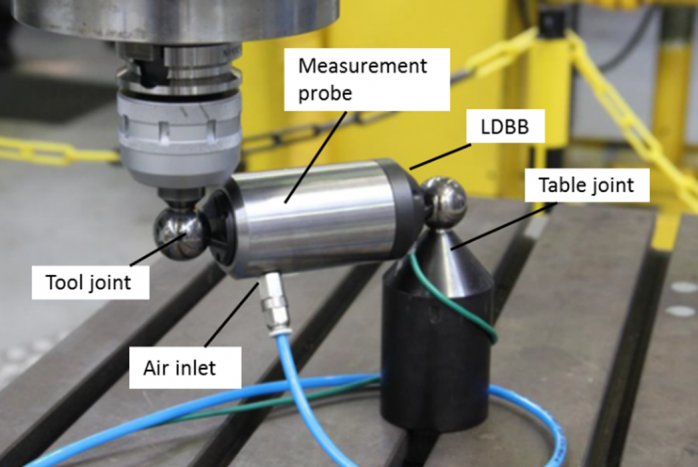
Außerdem wurde der an der KTH Stockholm entwickelte Loaded Double-Ball-Bar (LDBB) verwendet, um einen ABB IRB6700 Manipulator unter quasi-statischen Lasten von bis zu 600 Newton mittels Kreisversuchen nach ISO 230-4 zu bewerten. Die Steifigkeit wurde aus den belasteten kreisförmigen Trajektorien ermittelt. Anschließend wurde die Steifigkeit zur Durchführung einer Rückrechnung verwendet, um die kinematischen Fehler der Bahnabweichungen zu bestimmen. Das Konzept wurde in einer Fallstudie über quasistatische belastete Kreisprüfungen mit dem LDBB im Vergleich zu einem Leica AT960 Laser Tracker (LT) validiert.
Das Thema wurde kürzlich auf der CIRP sponsored Karpacz Conference XXXIII einem breiten Fachpublikum vorgestellt. Die zugehörige open access Veröffentlichung im Journal of Machine Engineering kann ab sofort unter folgender DOI abgerufen werden: https://doi.org/10.36897/jme/149413
Für Rückfragen steht Ihnen Herr Johann Marwitz gerne per Mail zur Verfügung: johann.marwitz@iwu.fraunhofer.de.
Quellenhinweise
[1] IFR, 2021, IFR presents World Robotics 2021 reports, https://ifr.org/ifr-press-releases/news/robot-sales-rise-again (accessed: Nov. 9, 2021).
[2] IBARAKI S., THEISSEN N.A., ARCHENTI A., ALAM M.M., 2021, Evaluation of Kinematic and Compliance Calibration of Serial Articulated Industrial Manipulators, Int. J. Automation Technol., 15/5, 567–580, DOI: 10.20965/ijat.2021.p0567.
[3] ISO-9283, 1998, Manipulating industrial robots – Performance criteria and related test methods, Genf: International Organisation for Standardisation.
[4] MOORING B., ROTH Z.S., DRIELS M.R., 1991, Fundamentals of Manipulator Calibration, New York, Wiley.








