


Was macht die Gruppe Umgebungswahrnehmung und Bewegungsadaption aus?
Aktuell verhindern kleine Lose und eine hohe Variantenvielfalt die Vollautomatisierung der Produktionsprozesse. Ein gewisser Grad der Flexibilisierung von Produktionssystemen kann durch die freie Verkettung von aufgabenspezifischen Robotern, Roboterzellen oder Werkzeugmaschinen erreicht werden. Allerdings ist deren Betrieb meist nur bei minimalen Einrichtaufwand wirtschaftlich. Die variierenden Umgebungsinformationen durch die offeneren Produktionssysteme (Objektpositionen oder -zustände) bedingen einen hohen Parametrier- und Programmieraufwand der Bewegungen bei gleichen oder ähnlichen Aufgabentypen. An der Lösung dieser Herausforderung arbeitet im Geschäftsfeld Kognitive Produktionssysteme die neue Gruppe Umgebungswahrnehmung und Bewegungsadaption. Die Idee ist, eine automatisierte, modelbasierte Interpretation von relevanten Umgebungsinformationen bei gleichen, sich wiederholenden Aufgaben zu ermöglichen. Dadurch können die Bewegungen der Roboter im Ablauf dynamisch angepasst werden.
Zielstellung der Forschungsinhalte
Vor diesem Hintergrund ist die Zielstellung der Gruppe Bewegungen von Produktionssystemen mithilfe von Methoden der Umgebungswahrnehmung adaptiv zu steuern. Hierfür werden im Integrationsprozess die benötigten Steuerungsparameter für einen Aufgabentyp modellhaft beschrieben, Algorithmen zur Ermittlung der Parameter implementiert sowie Sensorik zu Bereitstellung der Rohdaten für die Algorithmen ausgewählt und angebunden. Mit diesem Lösungsweg ist die Vision verbunden, die Ermittlung der Steuerungsparameter von Robotersystemen aus der Umgebung und die Ausführung von Bewegungsbefehlen in der SPS vollständig zu entkoppeln. So hat die Robotersteuerung zu jeder Zeit Zugriff auf ein aktuelles Modell der Umgebung. Auf dieses kann über eine Modellschnittstelle sofort referenziert und damit angepasst reagiert werden.
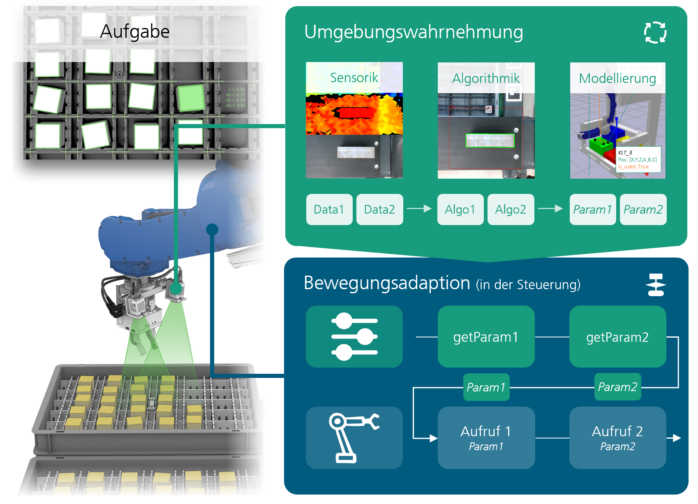
Um den Lösungsweg umzusetzen, arbeitet die Gruppe in den Bereichen Sensorik, Algorithmik und Modellierung zur Umgebungswahrnehmung und Bewegungsadaption. Im Bereich der Sensorik fokussiert sich die Gruppe auf die Verwendung von optischen Sensorsystemen, wie Stereokameras und 3D-Scannern. Methodisch werden zur Ermittlung von Objektinformationen deskriptive und lernbasierte Algorithmen zur Objekt- und Featuredetektion sowie Objektlokalisierung basierend auf 2D-und 3D-Rohdaten verwendet. Zur Zusammenführung und Persistierung aller Objektinformationen werden geometrische sowie semantische Umgebungsmodelle kontinuierlich aufgebaut und aktualisiert. So können die relevanten Steuerungsparameter zur Bewegungsadaption jederzeit übersetzt werden und sind durch die Steuerung ermittelbar.
Für weitere Informationen wenden Sie sich an Johannes Abicht, Leiter der Forschungsgruppe Umgebungswahrnehmung und Bewegungsadaption: johannes.abicht@iwu.fraunhofer.de.
Headerbild: © Fraunhofer IWU
Autorin und Autor: Lisa Martha Hecker und Johannes Abicht



