Anfang November 2025 traf sich das BioiC-Team zum Projektabschluss-Meeting in Neapel. Nach fünf Jahren intensiver Forschung und Zusammenarbeit zwischen dem Fraunhofer IWU und der Università degli Studi di Napoli Federico II wurde Bilanz gezogen: Welche Fortschritte wurden erzielt, welche Technologien sind einsatzbereit und wie geht es weiter?
Since this meeting was held with our colleagues from Italy we decided to share this article in English as well – please see below.
Ein Rückblick auf fünf Jahre Bioinspiration
Das Projekt BIOIC verfolgte das Ziel, die biologische Transformation der Produktion durch den Einsatz von bioinspirierten Soft-Robotern voranzutreiben. Diese Roboter zeichnen sich durch ihre Nachgiebigkeit, Sicherheit und Flexibilität aus und sind mit kognitiven Fähigkeiten ausgestattet, um sich an komplexe Aufgaben und wechselnde Umgebungen anzupassen. Die Forschung konzentrierte sich auf zwei komplementäre Entwicklungsrichtungen. Auf der einen Seite die Integration weicher Komponenten in bestehende Roboterstrukturen, um deren Flexibilität und kognitive Fähigkeiten zu erweitern. Hieraus resultierte der Soft Articulated Robot. Auf der anderen Seite die Entwicklung vollständig weicher Systeme mit adaptiver Steifigkeit, eingebetteten Sensoren und modellbasierter Steuerung. Aus diesem Ansatz ergaben sich die Technologieplattformen: Soft Robotic Grippers, die Soft Continuum Robots und der Soft Growing Robot. Als zusaätzliche BioiC Technologie wurden Soft Micro Robots entwickelt, die neue Möglichkeiten für medizinische Anwendungen eröffnen.
Die Entwicklung der fünf BioiC-Technologieplattformen folgte einer klaren Roadmap mit jährlichen Meilensteinen. Mit dem ersten Meilenstein wurde die Initialisierung abgeschlossen: eine Taxonomie für Soft-Robotics-Ansätze wurde erstellt, erste Strukturkomponenten mit adaptiver Steifigkeit entwickelt und getestet, und die Hardware-Infrastruktur für die Validierung aufgebaut. Der zweite Meilenstein umfasste die Etablierung von Designmethoden, digitalen Modellen sowie Material- und Fertigungstechniken, sowie die Realisierung und der Test erster Soft-Gripper. Im dritten Jahr folgte die mechatronische Entwicklung: Nachgiebige Festkörpergelenke für den Soft Articulated Robot wurden konstruiert, virtuelle Modelle für die digitale Inbetriebnahme erstellt und erste Sensor- und Steuerungskonzepte implementiert. Mit dem vierten Meilenstein wurden die Systeme um kognitive Fähigkeiten erweitert, darunter Bildverarbeitung, OPC-UA-Datenkommunikation und modellbasierte Steuerung mithilfe digitaler Zwillinge. Schließlich wurde zum Projektabschluss nach fünf Jahren die vollständige Integration erreicht und anhand verschiedener Anwendungsfälle demonstriert, dazu jedoch später mehr. Über die bisherigen projektbegleitenden Treffen lesen Sie hier:
- Wie weit ist die biologisch inspirierte Robotik? Ein Update aus dem Projekt BioiC – Kognitive Produktion
- Biologisch inspirierte Robotik und fachlicher Fortschritt im Projekt Bioic – Kognitive Produktion
- Advisory Board Meeting zum Projekt BIOIC in Dresden – Kognitive Produktion
- Projekt “BioiC” mit Kick-Off-Veranstaltung in Italien offiziell gestartet! – Kognitive Produktion

© Tobias Krüger
Technologische Highlights
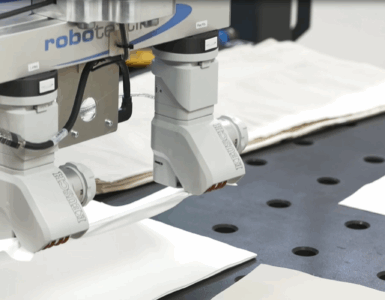
Während des zweitägigen Meetings wurden die finalen Ergebnisse vorgestellt und in Live-Demonstrationen erlebbar gemacht. Der zweiarmige Soft Articulated Robot zeigte eine kognitive Biegeoperation an Drähten und Rohren für den Sondermaschinenbau. Auf Grundlage des antrainierten Skillsets und erweiterten sensomotorische Fähigkeiten des Roboters und unter Einbeziehung umfangreicher Modelle zur Selbstbeschreibung konnten eine kognitive Bewegungsplanung und verbesserte Prozesswahrnehmung umgesetzt werden, um das Biegeergebnis zu verbessern. Weiterhin wurde die robuste Fernsteuerung des Soft Articulated Robot demonstriert, welche durch den Einsatz webbasierter Steuerungs- und Monitoring-Technologien, der skillbasierten Steuerung und des digitalen Zwillingsermöglicht wird. Die Soft Grippers bewiesen ihre Funktionalität bei der Handhabung von empfindlichen Lebensmitteln wie Tomaten und Äpfeln. Im Hinblick auf zukünftige Anwendungen in der Lebensmitteltechnik wurde die Technologie in Kombination mit einem Roboter und einem KI-unterstützter Vision System demonstriert. Zwei verschiedene Versionen des seriellen Soft Continuum Robot mit variabler Steifigkeit wurden vorgestellt, und stellen einen entscheidenden Schritt für eine sichere Mensch-Roboter-Kollaboration dar. Das erste Konzept basiert auf den Prinzipien der Partikel- und Schichtverspannung durch Vakuum. Das Zweite Konzept verspannt de Kugelgelenke zwischen den einzelnen Segmenten mit Druckluft, wodurch eine noch höhere Traglast und Reichweite des Manipulators ermöglicht wird. Ein weiterere Ansatz zum Soft Continuum Robot umfasst pneumatische Aktoren zur Realisierung von Soften Dreh- und Schubgelenken, die anhand eines überkopf hängenden Cobots demonstriert wurden. Die verschiedenen Lenkkonzepten des mit einer integrierten Kamera ausgestattet Soft Growing Robot wurde in einem Inspektionsszenario demonstriert, während die Soft Micro Robots Perspektiven für den Medikamententransport und die Herstellung von Mikrostrukturen eröffneten.

Strategische Diskussionen und zukünftige Perspektiven
Neben den technologischen Präsentationen und dem Rückblick auf die erfolgreiche internationale Zusammenarbeit rückten die strategischen Überlegungen für die Zeit nach Projektende in den Mittelpunkt. Gemeinsam mit dem Advisory Board diskutierte das Projektteam, wie die erzielten Ergebnisse weiter genutzt werden können. Dazu gehören das Benchmarking der entwickelten Technologien und ihr Transfer in die industrielle Anwendung, sowie die Vorbereitung neuer kooperativer Forschungsinitiativen zu Themen der Soft-Robotik, Digitalen Zwillingen, Training von KI-Lösungen in virtuellen Umgebungen und Mensch-Roboter-Kollaboration.
Das Meeting machte deutlich, welches Potenzial in der internationalen Kooperation zwischen dem Fraunhofer IWU und der Università degli Studi di Napoli Federico II steckt. Die im Projekt entwickelten Ansätze und Technologien bilden die Grundlage für eine neue Generation von Robotern, die flexibel, sicher und intelligent agieren können. Mit dem erfolgreichen Projektabschluss endet zwar ein wichtiger Abschnitt, doch die gemeinsame Reise geht weiter, mit dem klaren Ziel, die Ergebnisse in industrielle Anwendungen zu überführen, neue Forschungsinitiativen zu starten und eine europäische Kompetenzplattform für Soft Robotics aufzubauen. Wir freuen uns auf eine stetig wachsende Kollaboration, um gemeinsame neue Ideen und Lösungen für die Zukunft entwickeln, zu den wir Sie hier auf dem Laufenden halten.

Wollen Sie mehr über biologisch inspirierte kognitive Soft-Roboter erfahren, oder bei zukünftigen Projekten mitwirken?
Kontaktieren Sie uns und werden Sie Teil unserer Community. Oder folgen Sie uns auf unseren sozialen Kanälen für mehr Informationen und aktuelle Updates. Sie erreichen uns auf LinkedIn, oder via E-Mail unter tobias.krueger@iwu.fraunhofer.de.
Headerbild: © Fraunhofer IWU
Autor: Tobias Krüger
BioiC project completion in Naples: Biologically inspired soft robots for cognitive production
At the beginning of November 2025, the BioiC team met in Naples for the project completion meeting. After five years of intensive research and collaboration between Fraunhofer IWU and the Università degli Studi di Napoli Federico II, it was time to take stock: What progress had been made, which technologies were ready for use, and what were the next steps?
Review of five years of bioinspiration
The BIOIC project aimed to advance the biological transformation of production using bio-inspired soft robots. These robots are characterized by their compliance, safety, and flexibility and are equipped with cognitive abilities to adapt to complex tasks and changing environments. The research focused on two complementary areas of development. On the one hand, the integration of soft components into existing robot structures to expand their flexibility and cognitive abilities. This resulted in the Soft Articulated Robot. On the other hand, the development of completely soft systems with adaptive stiffness, embedded sensors, and model-based control. This approach resulted in the following technology platforms: Soft Robotic Grippers, Soft Continuum Robots, and the Soft Growing Robot. Soft Micro Robots were developed as additional BioiC technology, opening new possibilities for medical applications.
The development of the five BioiC technology platforms followed a clear roadmap with annual milestones. The first milestone marked the completion of the initialization phase: a taxonomy for soft robotics approaches was created, the first structural components with adaptive stiffness were developed and tested, and the hardware infrastructure for validation was set up. The second milestone included the establishment of design methods, digital models, and material and manufacturing techniques, as well as the realization and testing of the first soft grippers. The third year was devoted to mechatronic development: compliant solid-state joints for the soft articulated robot were designed, virtual models for digital commissioning were created, and initial sensor and control concepts were implemented. With the fourth milestone, the systems were expanded to include cognitive capabilities, including image processing, OPC UA data communication, and model-based control using digital twins. Finally, at the end of the five-year project, full integration was achieved and demonstrated using various use cases, but more on that later. You can read about the project meetings held so far here: (1), (2), (3) und (4).
Technological highlights
During the two-day meeting, the results were presented and brought to life in live demonstrations. The two-armed Soft Articulated Robot demonstrated a cognitive bending operation on wires and pipes for special machine construction. Based on the robot’s trained skill set and advanced sensorimotor capabilities, and incorporating extensive self-description models, cognitive motion planning and improved process perception were implemented to improve the bending result. Furthermore, the robust remote control of the Soft Articulated Robot was demonstrated, which is made possible using web-based control and monitoring technologies, skill-based control, and digital twins. The Soft Grippers proved their functionality in handling sensitive foods such as tomatoes and apples. With a view to future applications in food technology, the technology was demonstrated in combination with a robot and an AI-supported vision system. Two different versions of the serial Soft Continuum Robot with variable stiffness were presented, representing a decisive step toward safe human-robot collaboration. The first concept is based on the principles of particle and layer tensioning by vacuum. The second concept tensions the ball joints between the individual segments with compressed air, enabling an even higher load capacity and reach of the manipulator. Another approach to the Soft Continuum Robot involves pneumatic actuators to create soft rotary and thrust joints, which were demonstrated using an overhead Cobot. The various steering concepts of the Soft Growing Robot, equipped with an integrated camera, were demonstrated in an inspection scenario, while the Soft Micro Robots opened prospects for drug transport and the manufacture of microstructures.
Strategic discussions and future prospects
In addition to the technological presentations and a review of the successful international collaboration, the focus shifted to strategic considerations for the period after the end of the project. Together with the Advisory Board, the project team discussed how the results achieved could be further utilized. This includes benchmarking the technologies developed and transferring them to industrial applications, as well as preparing new cooperative research initiatives on topics such as soft robotics, digital twins, training AI solutions in virtual environments, and human-robot collaboration. The meeting highlighted the potential of international cooperation between Fraunhofer IWU and the Università degli Studi di Napoli Federico II. The approaches and technologies developed in the project form the basis for a new generation of robots that can act flexibly, safely, and intelligently. Although the successful completion of the project marks the end of an important phase, the joint journey continues with the clear goal of transferring the results into industrial applications, launching new research initiatives, and establishing a European competence platform for soft robotics. We look forward to an ever-growing collaboration to develop new ideas and solutions for the future, which we will keep you up to date on here.
Would you like to learn more about biologically inspired cognitive soft robots or get involved in future projects? Contact us and become part of our community. Or follow us on our social media channels for more information and the latest updates. You can reach us on LinkedIn, or via email at tobias.krueger@iwu.fraunhofer.de.
Review of five years of bioinspiration
The BIOIC project aimed to advance the biological transformation of production using bio-inspired soft robots. These robots are characterized by their compliance, safety, and flexibility and are equipped with cognitive abilities to adapt to complex tasks and changing environments. The research focused on two complementary areas of development. On the one hand, the integration of soft components into existing robot structures to expand their flexibility and cognitive abilities. This resulted in the Soft Articulated Robot. On the other hand, the development of completely soft systems with adaptive stiffness, embedded sensors, and model-based control. This approach resulted in the following technology platforms: Soft Robotic Grippers, Soft Continuum Robots, and the Soft Growing Robot. Soft Micro Robots were developed as additional BioiC technology, opening new possibilities for medical applications.
The development of the five BioiC technology platforms followed a clear roadmap with annual milestones. The first milestone marked the completion of the initialization phase: a taxonomy for soft robotics approaches was created, the first structural components with adaptive stiffness were developed and tested, and the hardware infrastructure for validation was set up. The second milestone included the establishment of design methods, digital models, and material and manufacturing techniques, as well as the realization and testing of the first soft grippers. The third year was devoted to mechatronic development: compliant solid-state joints for the soft articulated robot were designed, virtual models for digital commissioning were created, and initial sensor and control concepts were implemented. With the fourth milestone, the systems were expanded to include cognitive capabilities, including image processing, OPC UA data communication, and model-based control using digital twins. Finally, at the end of the five-year project, full integration was achieved and demonstrated using various use cases, but more on that later. You can read about the project meetings held so far here: (1), (2), (3) und (4).
Technological highlights
During the two-day meeting, the results were presented and brought to life in live demonstrations. The two-armed Soft Articulated Robot demonstrated a cognitive bending operation on wires and pipes for special machine construction. Based on the robot’s trained skill set and advanced sensorimotor capabilities, and incorporating extensive self-description models, cognitive motion planning and improved process perception were implemented to improve the bending result. Furthermore, the robust remote control of the Soft Articulated Robot was demonstrated, which is made possible using web-based control and monitoring technologies, skill-based control, and digital twins. The Soft Grippers proved their functionality in handling sensitive foods such as tomatoes and apples. With a view to future applications in food technology, the technology was demonstrated in combination with a robot and an AI-supported vision system. Two different versions of the serial Soft Continuum Robot with variable stiffness were presented, representing a decisive step toward safe human-robot collaboration. The first concept is based on the principles of particle and layer tensioning by vacuum. The second concept tensions the ball joints between the individual segments with compressed air, enabling an even higher load capacity and reach of the manipulator. Another approach to the Soft Continuum Robot involves pneumatic actuators to create soft rotary and thrust joints, which were demonstrated using an overhead Cobot. The various steering concepts of the Soft Growing Robot, equipped with an integrated camera, were demonstrated in an inspection scenario, while the Soft Micro Robots opened prospects for drug transport and the manufacture of microstructures.
Strategic discussions and future prospects
In addition to the technological presentations and a review of the successful international collaboration, the focus shifted to strategic considerations for the period after the end of the project. Together with the Advisory Board, the project team discussed how the results achieved could be further utilized. This includes benchmarking the technologies developed and transferring them to industrial applications, as well as preparing new cooperative research initiatives on topics such as soft robotics, digital twins, training AI solutions in virtual environments, and human-robot collaboration. The meeting highlighted the potential of international cooperation between Fraunhofer IWU and the Università degli Studi di Napoli Federico II. The approaches and technologies developed in the project form the basis for a new generation of robots that can act flexibly, safely, and intelligently. Although the successful completion of the project marks the end of an important phase, the joint journey continues with the clear goal of transferring the results into industrial applications, launching new research initiatives, and establishing a European competence platform for soft robotics. We look forward to an ever-growing collaboration to develop new ideas and solutions for the future, which we will keep you up to date on here.
Would you like to learn more about biologically inspired cognitive soft robots or get involved in future projects? Contact us and become part of our community. Or follow us on our social media channels for more information and the latest updates. You can reach us on LinkedIn, or via email at tobias.krueger@iwu.fraunhofer.de.