Since this meeting was held with our colleagues from Italy we decided to share this article in English as well. Please see below for the English version.
Im Rahmen des Projekts BIOIC (Bioinspired soft robotic systems for cognitive production) treiben seit Projektbeginn Anfang 2021 das Fraunhofer IWU und die Università degli Studi di Napoli Federico II gemeinsam die Forschung zu biologisch inspirierten und gezielt nachgiebigen Softrobotern voran. In diesem Beitrag stellen wir Ihnen die bisher erreichten technischen Fortschritte genauer vor. Wenn Sie einen Blick hinter die Kulissen des Treffens auf Capri werfen wollen, ist dieser Beitrag unsere Leseempfehlung.
Um die Robotik mit Konzepten der sogenannten „biologischen Transformation“ für neue Anwendungsfälle zu qualifizieren, wurden ausgehend von unterschiedlichen Ansätzen fünf verschiedene Technologiebereiche identifiziert. Die biologische Transformation ist ein Prozess der zunehmenden Nutzung von Materialien, Strukturen und Prinzipien der belebten Natur in der Technik mit dem Ziel einer nachhaltigen Wertschöpfung. Die im Vorhaben betrachteten Technologiebereiche und ihre Anwendungsfälle aus Industrie und Alltag stellen wir im Folgenden detailliert vor. Die bioinspirierten Konzepte reichen dabei von klassischen Industrierobotern, die schrittweise in ein nachgiebiges und sensorisch erweitertes System überführt werden sollen, über gezielt nachgiebige, pneumatisch angetriebene Greifer- und Roboterkonzepte mit einer variablen Steifigkeit, bis hin zu völlig neuen Lösungen mit Mikrorobotern. Die erhöhte Strukturnachgiebigkeit soll in Kombination mit kognitiven Fähigkeiten eine höhere Robustheit des Systems und eine sichere Zusammenarbeit von Roboter und Mensch ermöglichen.
Vorstellung der Anwendungsfelder und Prototypen
Der zweiarmige Soft Articulated Robot (Gelenknachgiebiger Industrieroboter) soll durch zusätzliche Sensorik den Prozess, ähnlich wie der Mensch, während der Ausführung anhand von Prozessfeedback anpassen können. So soll zukünftig z. B. die kombinierte Handhabung und Biegen unterschiedlicher Halbzeuge umgesetzt werden. Für die Realisierung werden nachgiebige Elemente in den Kraftfluss eingebracht. Parallel dazu erfolgt die Steuerungsentwicklung am digitalen Zwilling. Der echtzeitfähige digitale Zwilling des Soft Articulated Robot bildete letztes Jahr nur das Bewegungsverhalten des starren Roboters ab. Er wurde erweitert und kann nun auch die Dynamik des nachgiebigen Systems in Kontaktsituationen abbilden.
Diese Modellbildung stellt die Grundlage für eine modellbasierte Regelung und die Implementierung kognitiver Fähigkeiten dar. Beispiele kognitiver Fähigkeiten sind z. B. das “Wissen” des Systems über das eigene Verhalten und die eigenen Fähigkeiten und Nutzen dieser Informationen in der Steuerung. Das besondere Highlight der Demonstration zum Advisory Meeting war die Remotesteuerung des zweiarmigen Robotersystems, welches bei uns im Versuchsfeld in Dresden steht.
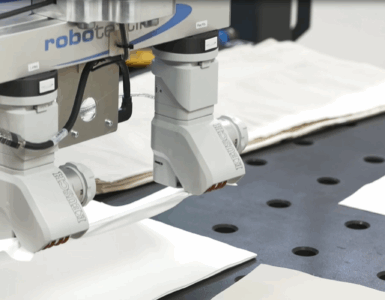
Der pneumatisch angetriebene Soft Gripper (gezielt nachgiebiger Greifer) aus Silikon nutzt sowohl Druckluft für die Fingerbiegung als auch Vakuumsauger, um empfindliche Objekte, wie z.B. einen Apfel zu greifen und zu manipulieren. Neben dem hier abgebildeten Zweifingergreifer existieren weitere Konzepte. Ein einfacher Tentakelgreifer wurde zur Handhabung von leicht verformbarem Mozzarella entwickelt. Für die Manipulation von kabelähnlichen, flexiblen Objekten in der Fertigungsindustrie wurde ein spezieller formadaptiver Greifer konzipiert. Auch ein Vakuum-basierter Textilgreifer für die Manipulation von gestapelten Kapseln in der Lebensmittelindustrie wurde umgesetzt.

Die Soft Continuum Robots (Strukturnachgiebige Kontinuumroboter) sollen zukünftig in der Mensch-Roboter-Kollaboration oder als Service-Roboter eingesetzt werden. Durch eine integrierte Medienführung ist auch eine Anwendung in der Chirurgie oder im Baugewerbe zum Aufbringen von Schäumen auf schwer zugängliche Oberflächen, z. B. die Innenseite eines Rohres denkbar. Die einzelnen Segmente des sehnengesteuerten Kontinuumroboters können mit Hilfe einer kleinen Vakuumpumpe nach dem Prinzip der Partikelverspannung ihre Steifigkeit von flexibel zu sehr steif variieren. An dem entwickelten Demonstrator konnte beim Meeting die Änderung der Segmentsteifigkeit live erfühlt werden. Am Beispiel des von der Decke hängenden, gewebebasierten Kontinuumroboters wurden neue Konzepte für pneumatisch aktuierte Gelenke vorgeführt, die lineare und rotatorische Bewegungen ermöglichen.
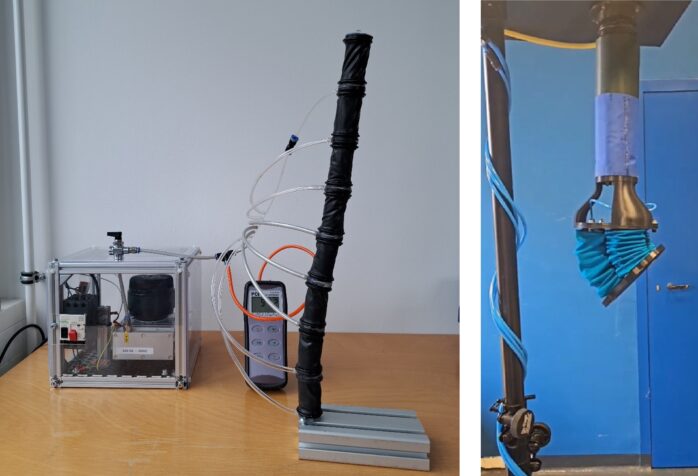
Rechts: Pneumatisch angetriebener, gewebebasierter Kontinuumroboter, © Stanislao Grazioso
Der passiv gelenkte Soft Growing Robot (weich wachsender Roboter) ermöglicht das Verlegen von Kabeln in schwer zugänglichen Umgebungen. Dafür besitzt er durch eine vorab durchgeführte Materialstreckung eine kontinuierliche Form bei der Richtungsänderung und meisterte so bei der Demonstration einen Hindernisparcours. Außerdem wurde eine Rückzugsvorrichtung und eine eigens für den Kabeltransport entwickelte magnetische Kappe vorgestellt.
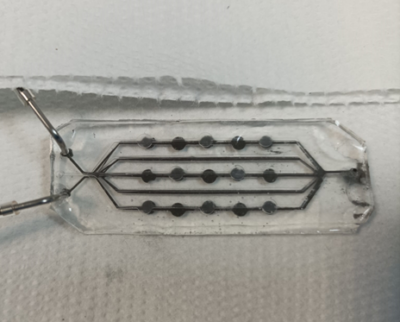
Auch eigenständige Soft Micro Robots (bioinspirierte Mikroroboter) für den gezielten Medikamententransport innerhalb des menschlichen Körpers könnten bald Realität werden. Ein Antriebskonzept wurde vorgestellt, welches auf der chemischen Reaktion von Natriumbicarbonat und Zitronensäure basiert. Die Bewegungsrichtung kann dabei über den Gradienten der Zitronensäurekonzentration im Transportmedium gesteuert werden. Außerdem wurden erste Konzepte für flexible Verformungssensoren, oder Mikrogreifer aus blockbasierten, magnetisch verformbaren Materialien entwickelt.
Wie geht es nun weiter?
In den kommenden zwei Jahren der Projektlaufzeit wird der Fokus verstärkt auf die Anwendungsfälle in Industrie und Wirtschaft und die Entwicklung der kognitiven Fähigkeiten gelegt. Dazu werden die Projektpartner in den einzelnen Themenbereichen noch enger zusammenarbeiten. Es sollen unter anderem die jeweiligen Stärken der Projektpartner noch besser genutzt und die verschiedenen Technologien miteinander verbunden werden. So soll zum Beispiel die variable Steifigkeit des Soft Continuum Robot auch in den Soft Growing Robot integriert oder der Soft Gripper mit dem Soft Articulated Robot kombiniert werden. Zu den Herausforderungen und Entwicklungen bei biologisch inspirierten Soft-Robotern halten wir Sie hier auf dem Laufenden.
Headerbild: © Fraunhofer IWU
Biologically inspired robotics and technical progress in the BioiC project
Biologically inspired soft robots – What progress has been made, what can the developed prototypes already do and in which directions is further development heading? An update on our “BIOIC” project at the Advisory Board Meeting on Capri.
As part of the BIOIC project (Bioinspired soft robotic systems for cognitive production), the Fraunhofer IWU and the Università degli Studi di Napoli Federico II have been collaborative driving forward research into biologically inspired and intrinsically soft robots since the start of the project in 2021. In this article, we present the technical progress achieved so far in more detail. If you would like to take a look behind the scenes of the meeting on Capri, we recommend reading this article.
In order to qualify robotics for new applications with concepts of so-called “biological transformation”, five different technology areas were identified based on different approaches. Biological transformation is a process of increasing use of materials, structures and principles of living nature in technology with the aim of sustainable value creation. The technology areas considered in the project and their use cases from industry and everyday life are presented in detail below. The bio-inspired concepts range from classic industrial robots, which are to be gradually transformed into a compliant and sensor-enhanced system, to intrinsically compliant, pneumatically driven gripper and robot concepts with variable stiffness, through to completely new solutions with micro-robots. In combination with cognitive capabilities, the increased structural flexibility should make the system more robust and enable safe cooperation between robots and humans.
Presentation of fields of application and prototypes
The two-armed Soft Articulated Robot will be able to adapt the process during execution based on process feedback, like humans do. This is going to be achieved by means of integration of additional sensors. In future, for example, the combined handling and bending of different semi-finished products is to be implemented. Compliant elements will be introduced into the force flow for this purpose. At the same time, control development is taking place on the digital twin. Last year, the real-time-capable digital twin of the Soft Articulated Robot only contained the movement behavior of the rigid robot. It has been expanded and now also includes the dynamics of the compliant system in contact situations.
This modeling forms the basis for model-based control and the implementation of cognitive capabilities. Examples of cognitive capabilities include the system’s “knowledge” of its own behavior and capabilities and the use of this information in the control system. The special highlight of the demonstration at the Advisory Meeting was the remote control of the two-armed robot system, which is located in our test field in Dresden.
The pneumatically driven Soft Gripper made of silicone uses both compressed air for finger bending and vacuum suction to grip and manipulate delicate objects such as an apple. In addition to the two-finger gripper shown here, other concepts exist. A simple tentacle gripper was developed for handling easily deformable mozzarella. Also, a special shape-adaptive soft gripper was designed for manipulating cable-like, flexible objects in the manufacturing industry. A vacuum-based textile gripper for manipulating stacked capsules in the food industry has also been also implemented.
The Soft Continuum Robots are to be used in future in human-robot collaboration or as service robots. Thanks to integrated media guidance, applications in surgery or in the construction industry for applying foams to hard-to-reach surfaces, e.g. the inside of a pipe, are also conceivable. The individual segments of the tendon-driven soft continuum robot were able to vary their stiffness from flexible to very stiff with the help of a small vacuum pump based on the principle of particle tensioning. The change in segment stiffness could be felt live at the meeting using the demonstrator. Using the example of the fabric-based soft continuum robot suspended from the ceiling, new concepts for pneumatically actuated joints that enable linear and rotational movements were presented.
Right: Pneumatically driven, fabric-based continuum robot, © Stanislao Grazioso
The passively steered Soft Growing Robot enables integrating cables in hard-to-reach areas. By stretching the material in advance, it has a continuous shape when changing direction and thus mastered an obstacle course during the demonstration. A retraction device and a magnetic cap specially developed for cable transportation were also presented.
Independent Soft Micro Robots for the targeted transportation of medication inside the human body could also soon become a reality. A drive concept was presented that is based on the chemical reaction of sodium bicarbonate and citric acid. The direction of movement can be controlled via the gradient of the citric acid concentration in the transport medium. Initial concepts for flexible deformation sensors and microgrippers made of block-based, magnetically deformable materials were also developed.
In which directions does it go from here?
Over the next two years of the project, the focus will increasingly be on use cases in industry and economy and the development of cognitive skills. To this end, the project partners will work even more closely together in the individual subject areas. The respective strengths of the project partners will be utilized even better and the various technologies will be combined. For example, the variable stiffness of the Soft Continuum Robot will also be integrated into the Soft Growing Robot and the Soft Gripper will be combined with the Soft Articulated Robot. We will keep you up to date on the challenges and developments in biologically inspired soft robots here.