Die Notwendigkeit einer schnellen Rekonfiguration von Steuerungsprogrammen in robotergestützten Produktionszellen hat zur Entwicklung zahlreicher Lösungen geführt. Beispiele hierfür sind Werkzeuge, die das Teachen der Roboterbewegung auf grafische Weise ermöglichen, oder Werkzeuge, die Drag-and-Drop zur Programmierung verwenden. Derartige Lösungen sind jedoch oft stark auf die Roboterbewegung ausgerichtet und bieten nur begrenzte Schnittstellen für zusätzliche Peripherieeinrichtungen in Automatisierungszellen.
Oftmals sind umfassendere Automatisierungslösungen mit modularen Roboterzellen immer noch statisch programmiert. Die Möglichkeiten zur Anpassung der Arbeitsaufgaben durch den Maschinenbediener sind hier begrenzt. Ein Lösungsansatz dafür, gerade im Hinblick auf komplexe Zellen, ist, die Art der Programmierung der Roboter möglichst niederschwellig zu gestalten. So können Maschinenbediener auch ohne umfassende Programmierkenntnisse Anpassungen der Arbeitsaufgaben vornehmen.
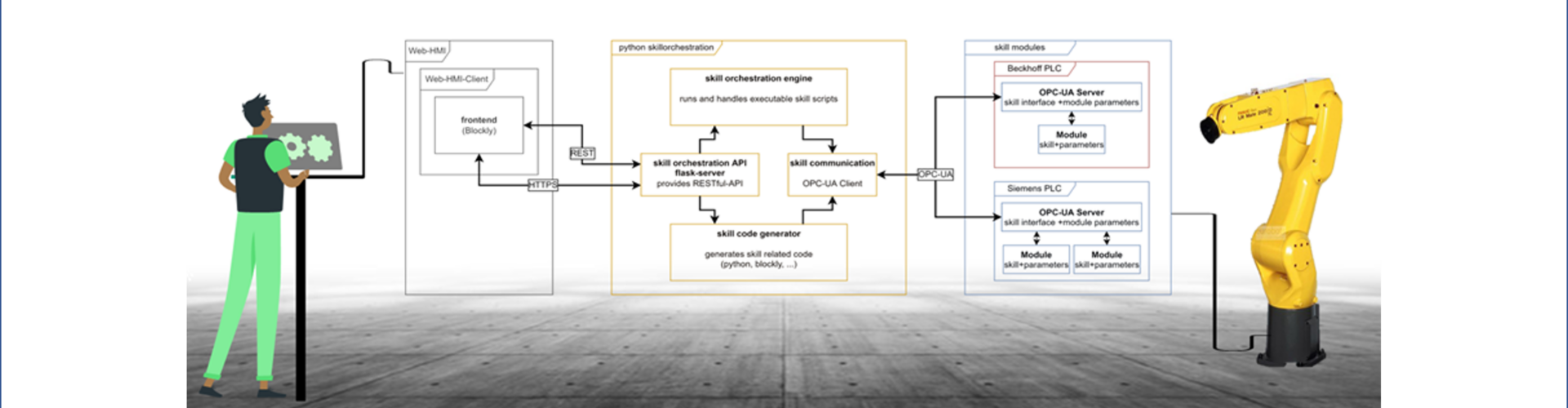
Das Fraunhofer IWU forscht in Zusammenarbeit mit der EKF Automation GmbH an einer innovativen Methodik, der “fähigkeitsbasierten Steuerung (skill-based control) “, die diesen Herausforderungen begegnen soll. Ziel ist es, den Anwendenden die Möglichkeit zu geben, die Steuerungen von Roboterzellen einfach anzupassen, Roboterbewegungen zu verändern und neue Funktionsmodule zu integrieren, ohne dass spezielles Fachwissen erforderlich ist. Eine solche Zelle ist mit einem zentralen fähigkeitsbasierten Steuerungssystem ausgestattet, welches auf die Fähigkeiten der Hardwaremodule zugreifen und diese orchestrieren kann. Diese Fähigkeiten ermöglichen die Steuerung der verschiedenen Module, wie Endeffektoren, anpassbare Fördersysteme, Teilespeicher, optische Inspektion und vieles mehr. Dank einheitlicher mechanischer, elektrischer und steuerungstechnischer Schnittstellen können neue Module ganz einfach integriert oder bestehende ausgetauscht werden. Die folgende Abbildung zeigt die Integrationsmöglichkeiten.

Die intuitive Benutzeroberfläche und parametrierbaren Fähigkeiten zielen darauf ab, die Bedienung und Rekonfiguration von Produktionsprozessen zu vereinfachen. Der zugrunde liegende Plug&Produce-Ansatz basiert auf der Modularisierung von Roboterzellen und implementiert einheitliche Schnittstellen, die eine einfache Kombination von Modulen (plug) ermöglichen. Eine fähigkeitsbasierte Steuerungsarchitektur ermöglicht den flexiblen, parametrierbaren Einsatz von Modulfunktionen, während ein dynamisches Orchestrierungssystem über eine benutzerfreundliche grafische Oberfläche auf diese Fähigkeiten zugreift und in einen konfigurierbaren Produktionsprozess überführt (produce). Basierend auf den Parametern und Anforderungen eines Produktes wird dessen Modifikation gezielt durchgeführt.
Aufbau Orchestrierungssystem
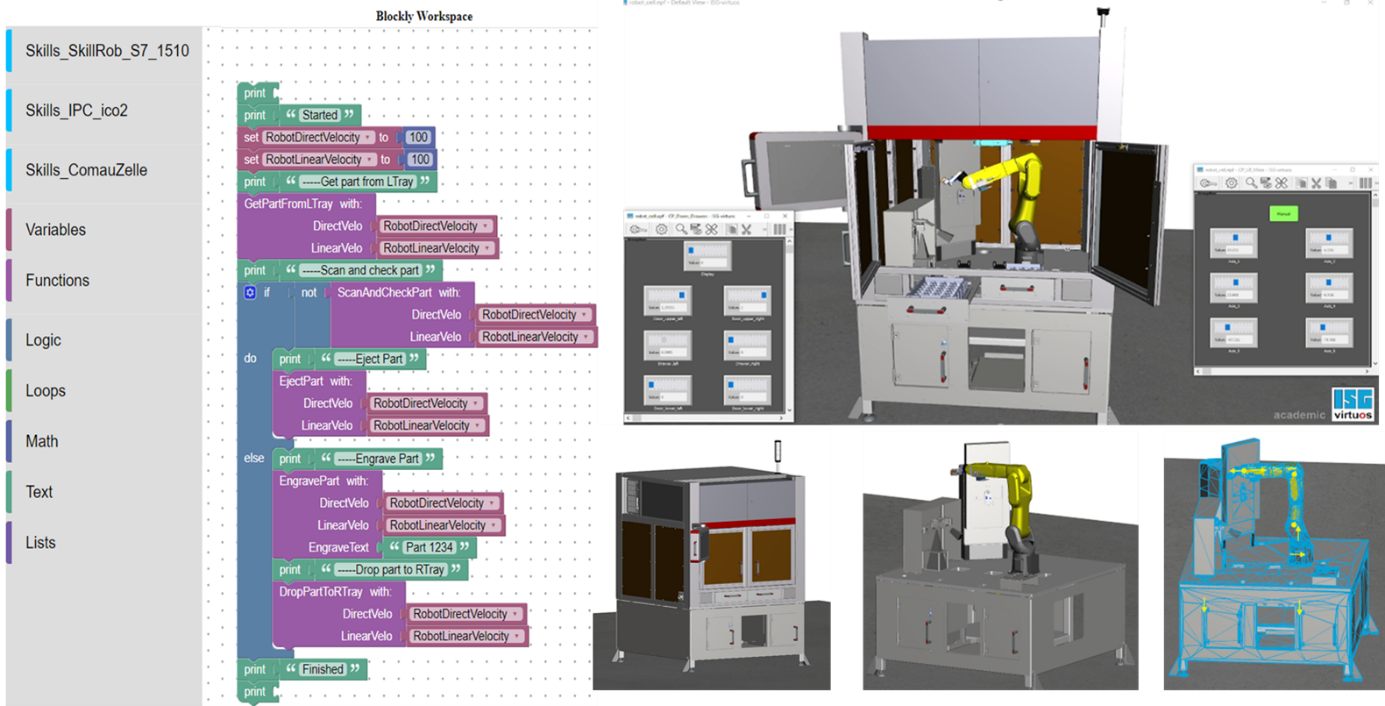
Ein dynamisches Orchestrierungssystem bietet eine benutzerfreundliche grafische Oberfläche, über die auf Fähigkeiten zugegriffen wird und sie in einen anpassbaren Produktionsprozess integrieren werden. Dies ermöglicht gezielte Anpassungen basierend auf den Anforderungen eines Produkts, ohne aufwendige Programmierungen.
Zum Testen der fähigkeitsbasierten Steuerung und zur Visualisierung der Roboterzelle kommt die virtuelle Inbetriebnahme-Umgebung ISG Virtuos zum Einsatz. In dieser wird eine Hardware-in-the-Loop (HiL) Simulation durchgeführt, welche über Profinet mit der realen SPS (Siemens) verbunden ist. Eine Veranschaulichung des Orchestrierungssystems und der virtuellen Roboterzelle ist in folgender Abbildung zu sehen:
Fazit
Bisher erfolgte im Rahmen des Projektes die Entwicklung eines modularisierten und flexiblen Automatisierungssystems für Roboterzellen in der Fertigungsindustrie. Dieses System zeichnet sich durch eine leichte Rekonfigurierbarkeit aus. SkillRob ermöglicht eine Steigerung der Flexibilität und Benutzerfreundlichkeit in der Fertigungsautomatisierung, indem es die Entwicklungszeit verkürzt und dem Endnutzer die Möglichkeit gibt, Module unabhängig zu integrieren. Eine einfache Anpassung der Produktionsprozesse ohne Programmierung wird ermöglicht. Im weiteren Verlauf wird das Design und die Usability des Orchestrierungssystems stärker in den Fokus gerückt.
Wenn auch Sie an der Einführung dieser Methode in Ihrem Unternehmen interessiert sind, zögern Sie nicht, uns zu kontaktieren. Wir helfen Ihnen gerne, Ihren Produktionsprozess auf die nächste Stufe zu heben. Als Ansprechpartner erreichen Sie Dr.-Ing. Christian Friedrich per E-Mail unter: christian.friedrich@iwu.fraunhofer.de.
Headerbild: © Fraunhofer IWU