Das Problem: Robotersteuerungen sind heterogen und müssen durch Experten programmiert werden
Der globale Trend zur Fertigung individueller Produkte erfordert in der Fertigung ein häufiges Umkonfigurieren und Umprogrammieren an den Produktionsanlagen [1]. Modulare Robotersysteme unterstützen diese Umstellung. Eine große Hürde besteht jedoch weiterhin in der noch nicht möglichen, schnellen Anpassung der Robotersteuerung, welche sich in drei Aspekten widerspiegeln:
- Die geringe Standardisierung im Bereich der Roboterprogrammierung führt zu einer hohen Herstellerabhängigkeit, geringer Übertragbarkeit und Erweiterbarkeit der Programme.
- Die Programmierung ist oft textbasiert und stark expertengebunden. Für jeden Hersteller sind dedizierte Schulungen notwendig, um das nötige Know-How aufzubauen.
- Unterstützende Sensorsysteme sind in ein Roboterprogramm nur schwer einzubinden und darin schwierig zu parametrieren.
Um die Stillstandzeiten von Robotersystemen zu minimieren und damit die Produktivität hochzuhalten, ist es notwendig, auch deren Steuerungen zu vereinheitlichen und Programmierweisen intuitiver zu gestalten.
Die Lösung: Programmieren und Steuern von Robotern über BPMN und OPC-UA-Skills
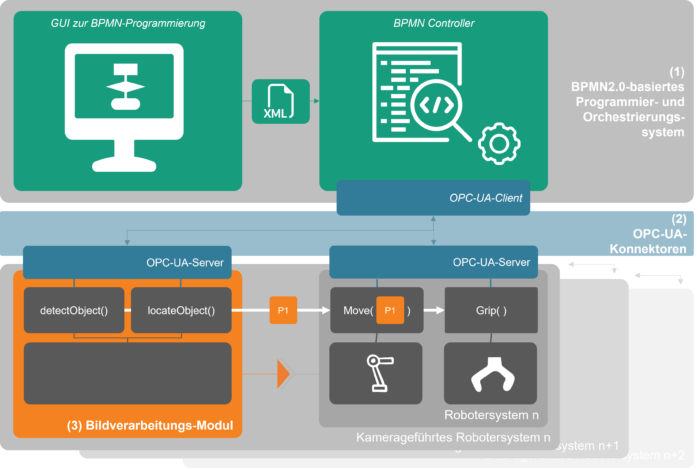
Das Fraunhofer IWU entwickelte gemeinsam mit dem Fraunhofer Austria in einem einjährigen Forschungsprojekt ein Software-Framework, welches diese Probleme durch die Kombination von OPC-UA und BPMN (Business Process Model and Notation) in drei Schritten synergetisch löst. Wie in Bild 1 zu sehen, werden zunächst alle Roboterfunktionen als OPC-UA-Skills in einer skillbasierten Steuerung gehostet. Ein blockbasiertes Programmier- und Orchestrierungssystem (BPMN Controller) nach dem BPMN-Standard steuert die OPC-UA-Skills an. Auf gleiche Weise wird ein Bildverarbeitungs-Modul zur automatischen Parametrierung der Skills innerhalb eines BPMN eingebunden.
Das Software-Framework ermöglicht es damit, einen Prozessablauf als BPMN-Modell blockbasiert zu programmieren und als XML-File zu speichern. Der BPMN-Controller liest die Informationen über den Ablauf aus, startet über die definierten OPC-UA-Skills die Roboterfunktionen und überwacht deren Zustand.
Drei Basistechnologien wurden synergetisch miteinander kombiniert
Grundlage des Software-Framework ist die skillbasierte Steuerung, die über ein Skill-Template vorgibt, wie Hardwarefunktionen eines Robotersystems programmiert werden [2]. Jeder Skill wird über einen OPC-UA-Server gehostet und kann über externe Controller herstellerunabhängig angesprochen werden. Hierzu dient der BPMN-Controller, in dem aus OPC-UA-Skills die BPMN-Modelle in einem Editor (BPMN.io) erstellt werden und so ausführbare Programme entstehen [3]. Ergänzt wurde das Software-Framework um ein Bildverarbeitungs-Modul, das Skills zur kamerabasierten Parameterberechnung bereitstellt. Eine Intel Realsense D453i Kamera dient als Sensorinput. Ein Variablenstack zur Laufzeit übergibt die errechneten Ergebnisse innerhalb eines BPMN-Modells an folgende Skills, sodass zum Beispiel kamerageführte Roboterbewegung programmiert werden können.
Das Software-Framework wird an einer mobilen Roboterzelle eingesetzt
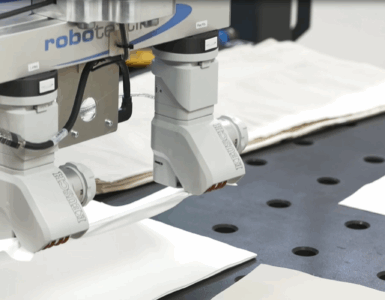
Das Software-Framework befindet sich an der am Fraunhofer IWU entwickelten, mobilen Roboterzelle Robo Operator® erfolgreich im Einsatz. Als Demonstrationsablauf dient ein Sortierprozess für zwei Stahlquader, wie in VIDEO 1 zu sehen.
Die skillbasierte Steuerung ist in TwinCAT3.1 (Beckhoff) umgesetzt. Der Programmablauf besteht aus einer Bauteilentnahme, Bauteilidentifizierung und sortierten Ablage in ein KLT, siehe VIDEO 2.
Einheitlichere Steuerung und intuitivere Programmierung von Robotern
Das Software-Framework bietet drei Vorteile im Vergleich zu bestehenden Roboterprogrammiersystemen:
- OPC-UA-Skills machen den Programmcode für Roboter einheitlich und austauschbar, ermöglichen die Übertragung von Programmen und die einfache Erweiterung der Roboterfunktionen.
- Eine Benutzeroberfläche für die Ablaufprogrammierung über BPMN-Modelle bietet eine intuitive Schnittstelle und ermöglicht eine nutzerzugeschnittene Programmierung.
- Ein Bildverarbeitungs-Modul reduziert die Wiederinbetriebnahmezeit durch die automatische Ermittlung von Steuerungsparametern in BPMN-Modellen.
Das Framework wird aktuell bewertet und auf weitere Steuerungen (Siemens, B&R) übertragen. Die Forschung konzentriert sich auf ein einheitliches Monitoring, Fehlerbehandlungen und einen sicheren Zugriff via OPC-UA. Mit dem Framework eröffnen sich vielversprechende Anknüpfungspunkte durch die Generalisierung des Ansatzes. BPMN-Modelle in Kombination mit Bildverarbeitung ermöglichen die Abstraktion von Standardprogrammen für Roboter mit minimalem Anpassungsaufwand. Die einheitlichen Skills fördern zudem die Selbstbeschreibung von Hardwarekomponenten und unterstützen Plug-and-Produce-Systeme. Auch eine verbesserte Simulationsfähigkeit durch die OPC-UA-Konnektoren ist ein Vorteil, da die Anbindung von Testumgebungen einfacher ermöglicht wird.
Wenn Sie an einer Demonstration oder Vorstellung des Frameworks interessiert sind, steht Ihnen unser Kollege Johannes Abicht gern zur Verfügung.
References
Headerbild: © Fraunhofer IWU
Autor: Johannes Abicht