Die deutsche Textilindustrie steht vor der Herausforderung, steigende Lohn- und Energiekosten in den Griff zu bekommen und gleichzeitig wettbewerbsfähig zu bleiben. Eine Schlüsselrolle spielen hier innovative Automatisierungslösungen, die bei der Vielzahl manueller Tätigkeiten unterstützen. Mit der Weiterentwicklung des Robo Operator® am IWU wird nun die Handhabung von biegeschlaffen Textilien mithilfe einer schnittstellenlos integrierbaren, mobilen Roboterzelle möglich.
In der deutschen Textilindustrie fehlen passende Automatisierungslösungen
Die deutsche Industrie befindet sich aktuell in einer herausfordernden Zeit mit Bürokratie, Fachkräftemangel und schwer planbaren politischen Rahmenbedingungen für Investitionen. Darüber hinaus sind jedoch besonders die in den letzten Jahren stark angestiegenen Energie- und Lohnkosten ausschlaggebend dafür, dass Unternehmen hierzulande ihre Produktionsprozesse effizienter gestalten müssen, um im globalen Markt unter den hiesigen Standortbedingungen weiterhin zu bestehen. Besonders die deutsche Textilbranche, die sich über die letzten Jahre mit qualitativ hochwertigen Produkten gegenüber Niedriglohnländern am Weltmarkt behaupten konnte, leidet im besonderen Maß darunter. Viele der vorhandenen Anlagen sind ältere, hochspezialisierte Lösungen, die viel Energie benötigen und manuell betreut werden. Trotz Investitionen in erneuerbare Energiesysteme oder Anlagenoptimierungen bleiben der Anteil manueller Tätigkeiten an den Maschinen und die damit verbundenen Lohnkosten weiterhin hoch. Neben Einrichtungs- und Kontrollprozessen (Warenschau) führen die Fachkräfte vor allem Handlings- und Beschickungsaufgaben aus, die mit etablierten Automatisierungsansätzen aus anderen Branchen, wie Robotersystemen, aufgrund der biegeschlafen Textilien nur schwer oder gar nicht umsetzbar sind. Die Unterstützung der Fachkräfte in diesen Bereichen ist eine wichtige Aufgabe, um die Textilproduktion in Deutschland effizienter, günstiger und damit zukunftsfähig zu machen.
Integration neuartiger Textilgreifer in eine mobile Roboterzelle
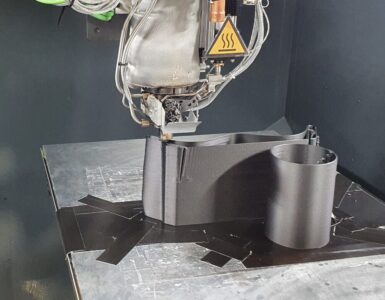
Das Fraunhofer IWU hat deshalb den Einsatz des in einem Forschungsprojekt entwickelten Versuchsträgers Robo Operator® untersucht. Die mobile Roboterzelle ist primär als schnittstellenlose Nachrüstlösung für die Maschinenbeladung von Fräs- und Drehmaschinen entwickelt worden und übernimmt hierbei Handlingsaufgaben sowie die Maschinenbedienung vollkommen autonom. Durch Kooperation mit der Firma robotextile aus Dormettingen, die spezialisierte Greiferlösungen für Textilien entwickelt, konnte die mobile Roboterzelle nun zur Vereinzelung und Handhabung von Textillagen vom Stapel befähigt werden. Hierzu wurden ein Greifer mit Rollprinzip sowie ein Greifer mit Coanda-Effekt über ein Wechselsystem nachgerüstet und in das Steuerungskonzept integriert.
Positionsflexibles Greifen von dünnen und steifen Textillagen zur Textilmaschinenbeladung
Die beiden Greifersysteme sind für unterschiedliche Herausforderungen im Textilbereich geeignet. Der Rollgreifer ist besonders für das Vereinzeln und Greifen steifer und dicker Textillagen wie bspw. Kunstleder ausgelegt und wird hierfür über die Justierung der Federkraft der Greifrollen eingestellt.
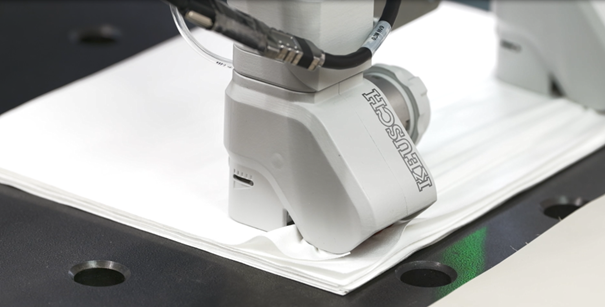
Der Coanda-Greifer ist hingegen besonders für dünne und filigrane Textillagen wie Stoff- und Papierlagen oder Folien nutzbar. Über ein sequenzielles Hochblasen, Ansaugen und Fixieren der Ecken werden die Textillagen vereinzelt, um sie danach gezielt auf einer Ablage abzulegen.
An beiden Greifersystemen befindet sich eine durch das IWU nachgerüstete Kamera mit Bildverarbeitungsalgorithmen, die die erste Lage des Textilstapels lokalisiert und die Greifposition bei Lageänderung automatisch anpasst. In der Robo Operator®-Bedienoberfläche können somit vordefinierte Programme geschrieben werden, die ein positionsflexibles Abgreifen der Textillagen und genaues Einlegen in Textilmaschinen automatisiert umsetzen.
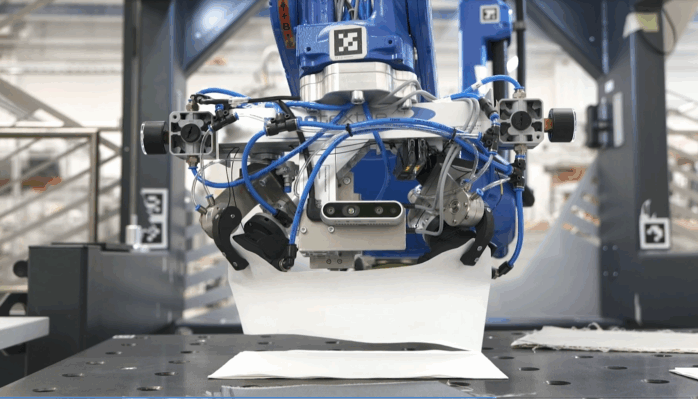
Über die synergetische Kombination einer mobilen Roboterzelle mit zwei Textilgreifersystemen von robotextile ermöglicht das Fraunhofer IWU, Textilmaschinen positionsflexibel zu beladen oder zu entladen. Die Automatisierungslösung ist damit z. B. für den zeitweisen Einsatz an Schneidtischen oder Druckmaschinen geeignet. Das Konzept des Robo Operator® minimiert den Integrationsaufwand im Unternehmen durch Wegfall zusätzlich nachzurüstender Schnittstellen und vordefinierter, kamerakorrigierter Programme auf ein Minimum. Unternehmen in der Textilindustrie können somit ihre Fachkräfte für höherwertige Einricht- und Kontrolltätigkeiten an den Maschinen einsetzen und die Arbeitsqualität und Mitarbeitereffizienz erhöhen. Gleichzeitig besteht durch die Verringerung der Aufgabenanzahl pro Mitarbeiter ein Potential zur Erhöhung der Maschinenauslastung, da Stillstandszeiten an den Maschinen reduziert werden.
Bei Fragen zur Lösung nehmen Sie gerne Kontakt mit Herrn Johannes Abicht auf. Die mobile Roboterzelle mit den Greifersystemen ist im Versuchsfeld des IWU zu sehen.
Headerbild: © Fraunhofer IWU
Autor: Johannes Abicht