


Ciao cari colleghi,
nun bin ich, Wilhelm Wockenfuß, schon die vierte Woche in Neapel (Italien). Die Zeit verfliegt in dieser sonnigen, schönen und chaotischen Stadt. Fragt man die Menschen, warum hier etwas so läuft, wie es eben läuft, reicht die Begründung „It’s Naples“ und alle verstehen. Die umgebende Landschaft ist malerisch und reicht von am Fels direkt am Meer gebauten Städtchen wie Amalfi, über wunderschöne Strände in Nerano bis hin zu wirklich bergigen Pfaden wie dem „Path of the Gods“. Als Liebhaber italienischer Spezialitäten bin ich hier genau an der richtigen Adresse. Und ich kann nur sagen: Ja, die beste Pizza findet man in Neapel. Aber es gibt davon abgesehen noch so viel mehr Köstlichkeiten, die ich kaum schaffen werde, alle in meinem zweimonatigen Aufenthalt hier auszuprobieren. Ein Leben ohne den richtigen „Mozzarella di bufala“ kann ich mir kaum noch vorstellen. Doch nun genug von der Schwärmerei. Warum bin ich denn eigentlich hier?

Gemeinsames Forschungsprojekt mit der Università degli Studi di Napoli Federico II (UNINA)
Als wissenschaftlicher Mitarbeiter am Fraunhofer IWU Dresden habe ich dankbar die Gelegenheit bekommen, mithilfe des „Fraunhofer International Mobility Program (FIM)“ für zwei Monate in Neapel an der Università degli Studi di Napoli Federico II (UNINA) zu arbeiten. Im Rahmen unseres gemeinsamen Forschungsprojektes „Bioinspired soft robotic systems for cognitive production (BIOIC)“, an dem auch die IWU-Hauptabteilung Cyber-physische Produktionssysteme beteiligt ist, arbeiten wir daran, Roboter und Mensch näher zueinander zu bringen – und das über den Anwendungsfall der Produktion hinaus auch im alltäglichen Umfeld.
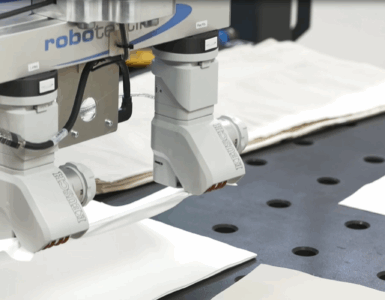
Wie wollen wir das schaffen? Indem wir Roboter aus nachgiebigen Materialien, sogenannte Soft Robotics, mit schaltbaren mechanischen Eigenschaften und kognitiven Fähigkeiten entwickeln. So erreichen wir eine inhärent sichere Mensch-Roboter-Kollaboration. Als kognitive Fähigkeiten sind hier die Selbst- und Umgebungswahrnehmung sowie die geeignete Reaktion des Roboters darauf zu verstehen. Lässt sich eine Kollision eines Roboterarms beispielsweise nicht durch ein Ausweichen vermeiden, wird der Roboterarm befähigt, lokal aufgelöst zu erweichen. Demzufolge wird eine Verletzung des Menschen verhindert. Als anderes Beispiel kann man sich hier einen Greifer vorstellen. Dieser ist in der in der Lage, Objekte verschiedener Oberflächenbeschaffenheit und Härte im Greifvorgang fühlend zu verstehen. So kann er diese sicher handhaben ohne die Objekte dabei zu beschädigen.
Fokus der Zusammenarbeit auf Entwicklung Soft Gripper mit adaptiver Steifigkeit
Nachdem ich die erste Woche dann aber doch erstmal damit beschäftigt war einen Antrag und ein Paper fertigzustellen – wer kennt es nicht? – bin ich nun voll und ganz dabei mich der gemeinsamen Arbeit mit den italienischen Kollegen zu widmen. Dabei liegt unser Fokus hier auf der Entwicklung eines neuartigen Soft Grippers mit adaptiver Steifigkeit. Wichtige Komponenten sind bestellt, die Konstruktion und der Aufbau schreiten voran und hoffentlich kann ich bald mit ersten Tests starten. Das Ziel ist es, einen formadaptiven Greifer zu erschaffen, der sowohl leichte und zerbrechliche als auch schwere Objekte unterschiedlichster Form schnell und zuverlässig handhaben kann. Davon abgesehen werde ich hier einen Workshop für die Studenten über das Thema „Adaptive Steifigkeiten in Soft Robotics“ durchführen. Auch kann ich mich mit allen BIOIC-Projektbeteiligten über die verschiedensten Projektthemen (Soft Continuum robots, Micro bots, Exoskeletons, rehabilitation devices etc.) austauschen und über zukünftige Themenstellungen sowie vielleicht neue Ideen und Projekte diskutieren.
Ich bin sehr gespannt auf die kommende Zeit und freue mich auf die weitere tolle Zusammenarbeit mit meinen Kollegen hier. Auch auf viele spannende Einblicke in die Arbeit und natürlich die Erkundung Süditaliens freue ich mich. Ihr hört von mir.
Beste Grüße,
Wilhelm Wockenfuß







Kommentar hinzufügen