

Die virtuellen Inbetriebnahme (VIBN) bietet schon heute die Möglichkeit Steuerungssoftware frühzeitig im Entwicklungsprozess von Maschinen und Anlagen am digitalen Zwilling zu entwickeln und damit die Zeit für die Inbetriebnahme deutlich zu verkürzen. Das Testen der Steuerungssoftware parallel zur Maschinenentwicklung bietet einen messbaren Mehrwert bei der Realisierung von automatisierten Produktionssystemen. Einen besonderen Zusatznutzen bietet die VIBN-Software, wenn sie direkt mit der Maschinen- oder Anlagensteuerung interagieren kann. Im Rahmen eines aktuellen Forschungsprojektes werden die Methoden der virtuellen Inbetriebnahme um notwendige Funktionen für die virtuelle Sicherheitsabnahme von Robotern, die mit Menschen interagieren sollen, erweitert.
Die Virtuelle Inbetriebnahme (VBIN) – Was geht schon heute?
Mit einer VIBN kann die Steuerung realer Produktionssysteme an einem digitalen Zwilling in Betrieb genommen werden. Dieser digitale Zwilling umfasst alle Maschinenkomponenten inklusive der Aktoren, Sensoren und Werkstücke. Die Geometrieinformationen werden in Form konventioneller CAD-Dateien beispielsweise im .STEP-Format eingelesen. So wird die gesamte Maschine in der VIBN-Software dreidimensional visualisiert. Bewegliche Komponenten werden entsprechend ihrer Freiheitsgrade mit Gelenken und virtuellen Antrieben versehen. Damit entsteht aus dem unbeweglichen CAD-Modell ein kinematisiertes Maschinenmodell.
Die Verknüpfung dieses Modells mit einem realen Steuerungssystem ermöglicht die Entwicklung und den Test von Steuerungsprogrammen an einer virtuellen Hardware, deren Verhalten weitgehend der realen entspricht. Voraussetzung für ein realitätsnahes Verhalten des Gesamtsystems ist die Berechnung des Simulationsmodells in deterministischer Steuerungsechtzeit, also mit einer maximalen Zykluszeit von bis zu 1 ms – je nach verwendeter Steuerung und deren Rechenlast. Dadurch wird es möglich, reale Steuerungen für eine „Hardware-in-the-Loop Simulation“ über gängige Feldbusse mit dem digitalen Zwilling zu verbinden. Das in konventioneller Vorgehensweise entwickelte Steuerungsprojekt der Maschine wird auf der Steuerungshardware gestartet, die dann anstelle der realen Aktoren und Sensoren mit den virtuellen im Simulationsmodell kommuniziert. Die virtuelle Maschine auf dem Computerbildschirm reagiert wie die reale Hardware auf die Anweisung der Steuerung. So kann die Ausführung des Steuerungsprogramms untersucht werden.
Weiterentwicklung von der VIBN hin zur virtuellen Sicherheitsabnahme
Die enge Zusammenarbeit mit innovativen Robotik- und Automatisierungsunternehmen wie coboworx im Rahmen der Allianz „Robot Valley Dresden“ rückte den Bedarf der Sicherheitsabnahme am Beispiel von Cobots in den Fokus. Die VIBN ist hierfür eine hervorragende Basis. Mit Unterstützung der Stadt Dresden konnte das Projekt „CoboTwin“ schließlich starten.
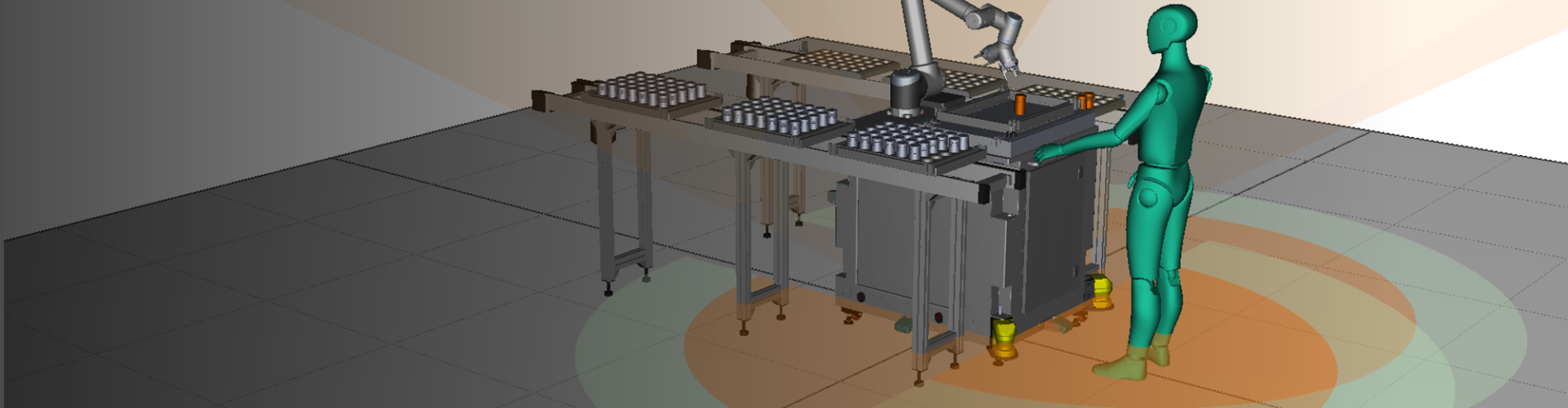
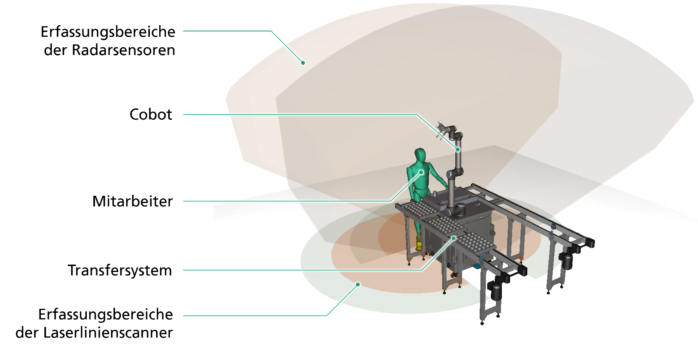
Cobots sind Roboter für die Mensch-Roboter-Kollaborationen (MRK) und speziell dafür ausgelegt, sich einen Arbeitsraum mit Menschen, ohne trennende Schutzeinrichtungen zu teilen. Sie können Mitarbeiter unterstützen, ohne sie dabei einzuschränken. Der „Kollege Roboter“ ist herfür ein umgangssprachlicher, aber inzwischen etablierter Begriff.
So schön die Vision der gemeinsamen Arbeit von Roboter und Mensch auch ist: Die Sicherheitszertifizierung solcher Cobot-Arbeitsplätze ist bisher jedoch zeitaufwändig und kann erst an der fertigen auf- oder umgebauten Anlage stattfinden. Aufwändige Messungen müssen durchgeführt werden, um die Sicherheit der Mitarbeiter zu gewährleisten. Die Folge sind lange, unwirtschaftliche Stillstandszeiten der eigentlich einsatzbereiten Cobots.
Dies wollen wir verhindern: Ziel des Projekts „CoboTwin“ ist es, diese Sicherheitstests schon im Vorfeld schnell und effizient, aber dennoch sicher, im Rahmen der VIBN am digitalen Zwilling durchzuführen. Die reale Anlage muss dafür – wie bei der VIBN – noch nicht existieren. Alle Bewegungsabläufe werden durch den digitalen Zwilling abgebildet und können so bewertet werden.
Für eine Sicherheitsprüfung ist ergänzend zum „klassischen“ VIBN- Modell auch das detaillierte Bewegungsverhalten des Cobots entscheidend. Für das start-Up coboworx entwickeln wir ein erweitertes VIBN-Modell eines Cobots mit besonders hoher Detailtiefe. Zusätzliche Algorithmen werden implementiert, um das Bewegungsverhalten in einer für die Sicherheitsabnahme ausreichenden Genauigkeit abzubilden. So werden der Antriebsstrang samt Motorregler und Getrieben sowie eine Vielzahl von mechanischen und dynamischen Größen berücksichtigt. Das in dieser Form neuartige VIBN-Modell wird auf Basis von Messungen am realen Cobot validiert.
Während der virtuellen Sicherheitsabnahme dokumentieren virtuelle Sensoren, beispielsweise am Roboterflansch oder an der Werkzeugspitze, präzise die ausgeführte Bewegung des virtuellen Cobots. Damit lassen sich Position, Geschwindigkeit, Beschleunigung und auch Nachlaufwege, wie beim Überschwingen nach einem Nothalt, bestimmen. Eine reale Vermessung des Cobots in der Applikation soll somit zukünftig nicht mehr notwendig sein. Damit wird wertvolle Zeit gespart.
Haben Sie Anregungen und/oder Fragen? Hinterlassen Sie gerne einen Kommentar.
Titelbild: © Fraunhofer IWU







Kommentar hinzufügen